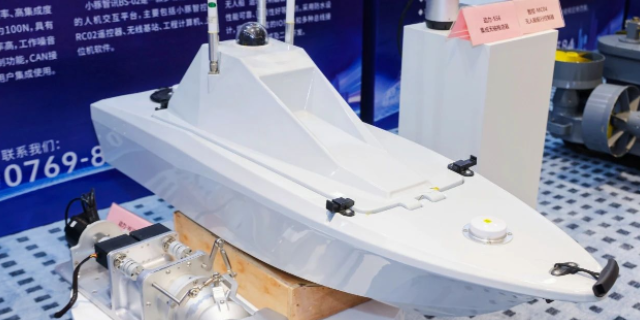
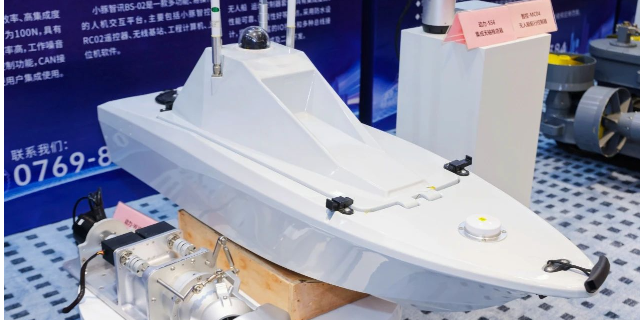
海洋牧场无人船的动力系统设计需兼顾作业续航与环境适应性,通常采用燃油或电力作为动力源,部分高级机型可实现油电混合驱动。电力驱动模式具有噪音低、污染小的优势,适用于近岸生态敏感型海洋牧场作业;燃油驱动则具备续航里程长、动力强劲的特点,更适合深远海长时间作业。动力系统需为船舶航行提供稳定的推进力,同时为感知设备、监测仪器、通信系统等提供持续的电力支持。其设计需充分考虑海洋环境的特殊性,具备良好的防水、防腐蚀性能,以适应高湿度、高盐雾的海上作业环境,保障设备长期稳定运行。无人船喷水推进具有推进效率高、抗空泡性强、附体阻力小、操纵性好、传动轴系简单等常规螺旋桨不及的优点。江苏海洋牧场无人船常见问题
海洋牧场无人船在日常作业中积累了大量的海洋环境数据,这些数据正在催生新的管理模式。通过部署多艘无人船组网监测,可以构建海洋牧场的数字孪生系统,实现养殖环境的可视化管理和智能预警。小豚智能开发的云端数据分析平台,能够对无人船采集的水质、气象等参数进行深度挖掘,为养殖密度调控、投喂策略优化提供科学依据。这种数据驱动的精细化管理方式,正在帮助养殖企业从经验型向智能型转变,提升整体运营效益的同时,也为海洋大数据应用开辟了新途径。 集成海洋牧场无人船哪家强无人船喷水推进器喷水推进装置利用喷射水流产生的反作用力驱动船只前进,喷水推进装置由进水管道等组成。
随着技术的进步和应用场景的拓展,海洋牧场无人船的未来充满了无限可能。未来,无人船将能够承担更多样化、更复杂的任务,如海底资源开采、深海探测等。同时,无人船还将在环保、救援、旅游等领域发挥更加重要的作用,为人类探索和利用海洋资源提供有力支持。
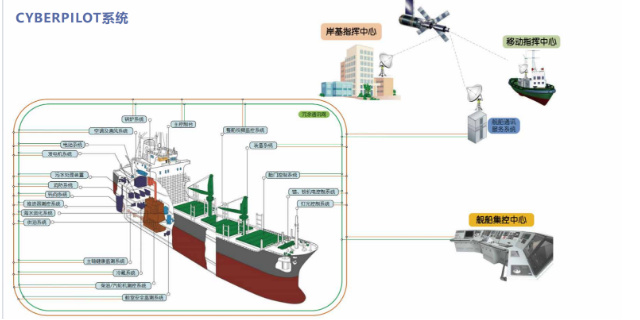
海洋牧场无人船作为智慧渔业的重要装备,其中心系统由感知、决策、控制三大模块构成,各模块协同运作保障作业的有序开展。感知系统集成雷达、激光雷达、数字照相机及北斗全球定位系统模块等设备,可精细捕捉自身位置、航速、航向等导航信息,同时对周边船舶、浮冰、漂浮物等障碍物进行多方面探测。决策系统基于感知数据完成目标检测与跟踪,结合预设作业需求生成比较好航行路线,并具备实时更新路径以实现避碰的能力。控制系统则承担手动与自动模式切换、油门挡位调节、液压转向控制等功能,支持远程遥控与自主航行两种中心操作模式,为海洋牧场各类作业提供稳定的操控支撑。上海及珠江三角洲一带高速客船使用喷水推进系统的船舶占90%以上,一部分就是使用小豚无人船喷水推进器。

海洋牧场无人船在渔业资源调查中具有独特优势,可深入传统调查船舶难以抵达的浅海或复杂海域开展作业。船舶搭载的侧扫声呐、水下相机等设备可对海域内的鱼类种群分布、数量、生长状态进行精细探测,结合定位数据生成渔业资源分布图谱。相较于传统的拖网调查或人工采样方式,无人船调查具有非接触性、低干扰性的特点,可避免对海洋生态环境与渔业资源造成破坏。同时,无人船可实现长时间、大范围的连续调查,获取的数据更加多方面、连续,为渔业资源的养护与管理提供科学的决策依据。公司致力于研发无人船平台。什么是海洋牧场无人船供应商
可做船舶改造,实现辅助驾驶系统。江苏海洋牧场无人船常见问题
海洋牧场的作业环境往往充满挑战,如盐雾腐蚀、风浪冲击等,因此海洋牧场无人船在设计上需进行针对性改造。船体采用抗腐蚀材料,能抵御海水长期浸泡带来的损耗;密封性能强化的舱体可保护内部电路与设备,避免盐雾渗入导致故障。在动力系统方面,部分无人船配备可调节吃水深度的装置,既能在浅滩区域灵活穿梭,又能在深水区保持稳定航行。面对突发风浪,其重心控制系统可快速调整姿态,减少颠簸对设备的影响。这些改造让海洋牧场无人船能在复杂海况下持续工作,保障养殖管理的连续性。江苏海洋牧场无人船常见问题