海洋牧场无人船的研发依托于小豚智能强大的技术积累和实验平台。公司在东莞松山湖建有全自主无人艇试验基地,为无人船的稳定性、抗风浪性能和环境适应性提供了测试条件。在关键技术方面,海洋牧场无人船采用了小豚智控和小豚智讯等主要部件,确保了导航精度和通信可靠性。此外,无人船还融合了人工智能算法,能够自主学习海洋环境变化规律,优化作业路径。小豚智能与多家高校和科研院所合作,持续推动无人船在海洋牧场领域的创新应用,相关成果已通过检验和鉴定,技术成熟度达到行业先进水平。无论是日常监测还是应急处理,小豚智能无人船都能迅速响应,确保海洋牧场的稳定运营。河南海洋牧场无人船商家

在应急处置场景中,海洋牧场无人船可快速响应完成多样化的应急任务,提升海洋牧场的风险应对能力。当海域发生水质突变、网箱破损等突发情况时,无人船可快速抵达事发区域,通过搭载的监测设备获取实时数据,为应急决策提供依据;若发生网箱泄漏,无人船可携带封堵设备前往处置,同时跟踪泄漏渔获的扩散轨迹;在海上搜救任务中,无人船可搭载搜救设备开展大范围搜索,扩大搜救范围并提升搜救效率。其快速响应与灵活作业的特点,使海洋牧场无人船成为海洋牧场应急管理体系中的重要组成部分。自动海洋牧场无人船商家无人船喷水推进具有推进效率高、抗空泡性强、附体阻力小、操纵性好、传动轴系简单等常规螺旋桨不及的优点。
随着海洋牧场规模化发展,无人船技术将向集群化、智能化方向演进。未来,多艘无人船可组成协同作业网络,分别承担监测、投喂、清洁等不同任务,并通过云端平台统一调度。喷水推进技术的进一步优化将提升无人船的续航能力和抗风浪性能,使其适应更深远的离岸养殖场景。此外,结合AI和物联网技术,无人船可形成“感知-决策-执行”闭环,实现海洋牧场的全自动管理。东莞小豚智能技术有限公司正积极研发新一代海洋牧场无人船系统,推动智慧渔业的技术升级,助力蓝色经济可持续发展。
海洋牧场无人船的导航系统具备多源融合与冗余设计,确保在复杂海上环境中定位的连续性与准确性。除中心的北斗全球定位系统外,还可集成GPS、GLONASS等其他卫星导航系统,通过多源数据融合提升定位精度,避一导航系统故障导致的定位失效。同时,系统配备惯性导航作为备用导航方式,在卫星信号受遮挡或干扰时,可通过惯性测量单元获取船舶的姿态与位置信息,保障航行与作业的连续性。这种冗余设计大幅提升了导航系统的可靠性,为海洋牧场无人船在复杂海域的作业提供了稳定的定位支撑。耿涛团队在业内率先提出“全自主无人艇”概念。当时,国内无人艇技术研究仍处于初级阶段船舶智能化改造。

在网箱养殖海洋牧场中,海洋牧场无人船的作业流程形成了标准化的闭环管理。作业前,操作人员通过岸端系统规划航行路线与作业参数,明确各网箱的投饵量、监测点位置等信息;作业中,无人船自主航行至各网箱区域,完成投饵作业后启动水质与生物监测,实时回传作业数据;作业后,系统自动生成作业报告,包含投饵总量、水质监测结果、生物生长状态等信息。这种标准化流程不*提升了作业效率,还实现了养殖作业的可追溯性,便于操作人员及时发现作业问题并调整策略,推动网箱养殖从经验管理向数据驱动的科学管理转变。公司致力于研发无人系统共性技术。集成海洋牧场无人船价格咨询
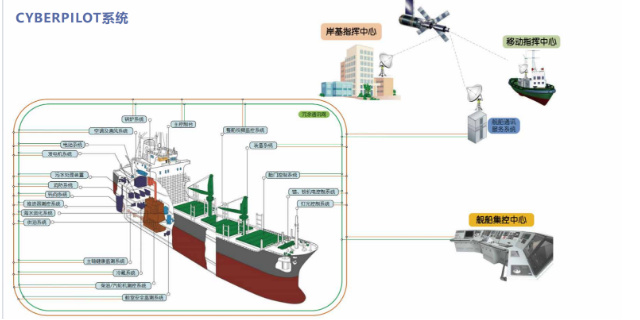
船舶智能化改造,小豚智能负责了船舶智能测控平台的信息采集、数据显示、航行控制研究。河南海洋牧场无人船商家
海洋牧场无人船积累的海量数据,通过算法模型处理后可转化为具体的管理决策建议。例如,将连续一周的水温、溶解氧数据与鱼类进食量对比分析,能得出比较好投喂时段;结合洋流方向与网箱位置数据,可优化网箱布局以减少鱼类应激反应。这些数据还能辅助判断养殖周期,当监测到鱼类平均体重达到预设阈值时,系统会自动提醒捕捞时间,避免过度养殖导致的资源浪费。对于多区域牧场,无人船可汇总各区域数据,生成横向对比报告,帮助管理人员发现不同区域的养殖差异,针对性调整管理策略。河南海洋牧场无人船商家