海洋牧场无人船的声学监测技术为海洋生物研究提供了全新的视角,通过搭载多波束高分辨成像声呐,可对网箱水域进行立体扫描,获取鱼群密度分布、活动轨迹、单体尺寸等详细信息。声学监测技术具备穿透性强、不受光照条件影响的优势,可在浑浊海水或夜间环境下正常工作,弥补了光学监测的局限性。通过对声学数据的长期积累与分析,可深入了解海洋生物的生长规律、行为习性,为养殖品种的优化选择、养殖密度的科学调控提供依据,推动海洋牧场养殖技术的升级。上海及珠江三角洲一带高速客船使用喷水推进系统的船舶占90%以上,一部分就是使用小豚无人船喷水推进器。湖南海洋牧场无人船参数

编队控制技术的应用,使多艘海洋牧场无人船可协同完成复杂作业任务,提升整体作业效率。通过通信系统构建的编队网络,各船舶可实现位置信息共享、作业指令同步,根据预设的作业规划完成分区作业、接力作业等协同模式。例如在大规模海洋牧场的投饵作业中,多艘无人船可按预设航线分区投喂,避免作业重叠与遗漏;环境监测任务中,编队船舶可实现监测区域的全覆盖扫描,缩短监测周期。编队控制技术需解决多船之间的避碰协调、指令同步等中心问题,依赖高精度定位与高效通信技术的支撑,是海洋牧场无人船规模化应用的重要技术方向。湖北海洋牧场无人船调试通过小豚智能的自主导航技术,无人船能够自动规划航线,优化海洋牧场的资源分配。

海洋牧场无人船的导航系统具备多源融合与冗余设计,确保在复杂海上环境中定位的连续性与准确性。除中心的北斗全球定位系统外,还可集成GPS、GLONASS等其他卫星导航系统,通过多源数据融合提升定位精度,避一导航系统故障导致的定位失效。同时,系统配备惯性导航作为备用导航方式,在卫星信号受遮挡或干扰时,可通过惯性测量单元获取船舶的姿态与位置信息,保障航行与作业的连续性。这种冗余设计大幅提升了导航系统的可靠性,为海洋牧场无人船在复杂海域的作业提供了稳定的定位支撑。
未来,随着技术的持续迭代,海洋牧场无人船将向更智能、更集成化的方向发展。人工智能与大数据技术的深度融合,将进一步提升船舶的自主决策能力,实现从单船自主作业向多船协同无人值守的跨越;新能源技术的应用,如太阳能、氢能等,将降低船舶对传统能源的依赖,提升环保性能;与水下机器人、无人机等设备的联动融合,将构建“空-海-潜”一体化的海洋牧场监测与作业网络。这些技术突破将不断拓展海洋牧场无人船的应用边界,为智慧渔业的发展注入更强动力。小豚智能在东莞的发展历程,正是高校科研成果青苹果转换成生产应用红苹果的生动实践船舶智能化改造。
海洋牧场无人船在海上应急救援领域展现出独特价值。当海洋牧场遭遇台风、赤潮等突发事件时,传统人工巡查方式往往面临响应慢、风险高等问题。而配备专业设备的无人船可快速抵达目标海域,实时回传现场画面和水文数据,为救援决策提供资料。小豚智能研发的海洋牧场无人船具备较强的抗风浪性能,能在恶劣天气条件下执行搜救任务,其搭载的热成像仪和生命探测装置可协助定位落水人员。这种"海陆空"协同的立体救援模式,正在改变传统海洋灾害应对方式,为海上安全生产提供新的保障手段。东莞小豚智能总经理耿涛在《船舶辅助驾驶系统》的报告中介绍了海洋开发、船舶的智能化和绿色化。湖北海洋牧场无人船调试
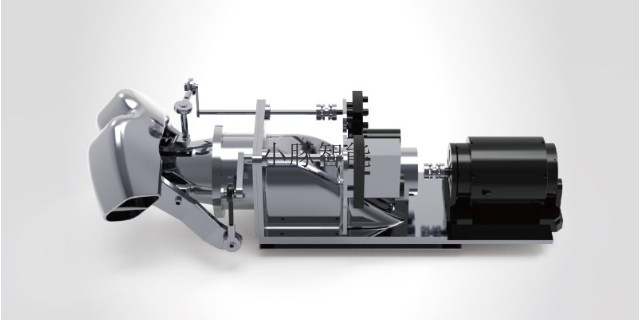
无人船喷水推进具有推进效率高、抗空泡性强、附体阻力小、操纵性好、传动轴系简单等常规螺旋桨不及的优点。湖南海洋牧场无人船参数
北斗全球定位系统在海洋牧场无人船的定位导航中发挥中心作用,结合惯性测量单元构成的多源组合导航模块,可提供高精度的位置、航速、航向等导航信息。在海上作业环境中,北斗系统具备抗干扰能力强、定位精度高的特点,能够有效克服传统导航方式受天气、地形影响的局限。通过实时获取的定位数据,海洋牧场无人船可精细遵循预设航线航行,确保作业区域的准确性;同时,定位数据与作业数据绑定存储,为后续的作业溯源与数据分析提供空间坐标支撑,提升海洋牧场管理的精细化水平。湖南海洋牧场无人船参数