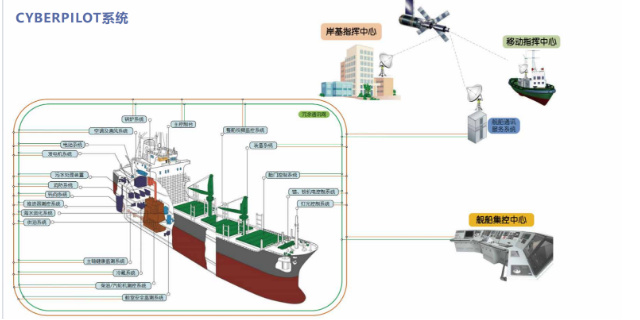
海洋牧场无人船在海洋生态环境监测领域发挥着重要作用。通过搭载水质传感器、摄像设备和声呐系统,无人船能够实时采集水温、盐度、溶解氧、pH值等关键指标,并将数据回传至控制中心,为海洋牧场的科学管理提供依据。此外,无人船还可用于监测赤潮、污染物扩散等突发环境问题,帮助养殖企业及时采取应对措施。小豚智能的海洋牧场无人船采用模块化设计,可根据任务需求灵活更换载荷,满足不同场景的监测需求。这一技术的应用不*提升了海洋牧场的环境管理水平,也为海洋生态保护提供了新的技术手段。无人船喷水推进器喷水推进装置利用喷射水流产生的反作用力驱动船只前进,喷水推进装置由进水管道等组成。自动海洋牧场无人船机械结构
海洋牧场无人船在设备投放作业中展现出高效的作业能力,可搭载水下机器人、监测浮标等设备抵达指定作业区域完成精细投放。作业前,操作人员通过系统规划投放路线与投放点坐标,无人船借助高精度定位系统抵达目标区域后,通过机械臂或主用投放装置将设备平稳放入海中。投放过程中,船舶的稳定控制系统可抵消海况扰动,确保设备投放的准确性;水下摄像头实时回传投放画面,便于操作人员确认投放效果。这种作业模式避免了人工投放过程中设备碰撞、投放偏差等问题,提升了设备投放的效率与安全性,为海洋牧场的信息化建设提供设备部署支撑。吉林现代海洋牧场无人船东莞小豚智能总经理耿涛在《船舶辅助驾驶系统》的报告中介绍了海洋开发、船舶的智能化和绿色化。

海洋牧场无人船的抗腐蚀设计是适应海上作业环境的关键技术要求,船体与设备需采用耐腐蚀性强的材料与防护工艺。船体结构多选用不锈钢、铝合金等耐蚀材料,表面采用防腐涂层处理,增强对海水盐雾、微生物腐蚀的抵抗能力;设备接口采用密封设计,防止海水渗入造成电路短路或部件损坏;动力系统、通信系统等中心组件配备专门的防腐罩,进一步提升防护等级。良好的抗腐蚀设计可延长海洋牧场无人船的使用寿命,降低设备维护成本,确保其在长期海上作业中保持稳定的性能。
海洋牧场无人船的动力系统设计需兼顾作业续航与环境适应性,通常采用燃油或电力作为动力源,部分高级机型可实现油电混合驱动。电力驱动模式具有噪音低、污染小的优势,适用于近岸生态敏感型海洋牧场作业;燃油驱动则具备续航里程长、动力强劲的特点,更适合深远海长时间作业。动力系统需为船舶航行提供稳定的推进力,同时为感知设备、监测仪器、通信系统等提供持续的电力支持。其设计需充分考虑海洋环境的特殊性,具备良好的防水、防腐蚀性能,以适应高湿度、高盐雾的海上作业环境,保障设备长期稳定运行。2021年,小豚智能获年度广东省技术发明奖一等奖,是东莞近10年来获得该奖项。船舶智能化改造。

长期来看,海洋牧场无人船的应用能明显优化养殖成本结构。在设备投入初期,虽然购置与调试需要一定资金,但相较于人工巡检的长期人力成本,其性价比随使用时间逐步提升。例如,一艘无人船可替代3-5名巡检人员的日常工作,且能覆盖更大范围,减少因人工疏漏导致的损失。在能耗方面,新型无人船采用节能电机与流线型船体设计,单位作业面积的能耗较传统船舶降低约20%。此外,精细投喂功能可减少15%-20%的饲料浪费,间接降低养殖成本。这些成本优化效应,让中小型海洋牧场也能逐步引入智能化设备,推动行业整体升级。船舶智能化改造,展示了行业应用提供了一站式解决方案,并获第四届无人系统行业金翼奖。吉林现代海洋牧场无人船
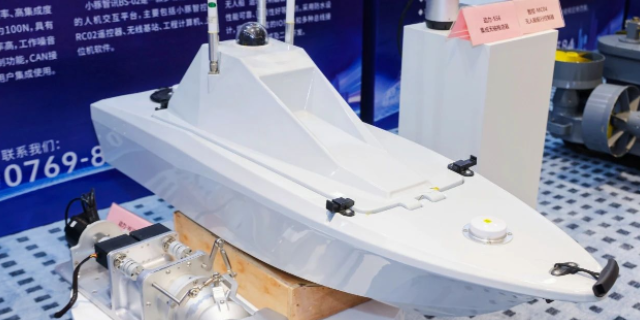
小豚船舶智能化改造,实现了多尺度多种类船舶的无人化快速部署。自动海洋牧场无人船机械结构
海洋牧场无人船的声学监测技术为海洋生物研究提供了全新的视角,通过搭载多波束高分辨成像声呐,可对网箱水域进行立体扫描,获取鱼群密度分布、活动轨迹、单体尺寸等详细信息。声学监测技术具备穿透性强、不受光照条件影响的优势,可在浑浊海水或夜间环境下正常工作,弥补了光学监测的局限性。通过对声学数据的长期积累与分析,可深入了解海洋生物的生长规律、行为习性,为养殖品种的优化选择、养殖密度的科学调控提供依据,推动海洋牧场养殖技术的升级。自动海洋牧场无人船机械结构