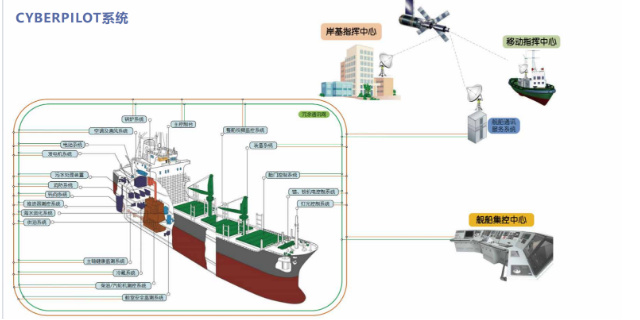
海洋牧场无人船作为智慧渔业的重要装备,其中心系统由感知、决策、控制三大模块构成,各模块协同运作保障作业的有序开展。感知系统集成雷达、激光雷达、数字照相机及北斗全球定位系统模块等设备,可精细捕捉自身位置、航速、航向等导航信息,同时对周边船舶、浮冰、漂浮物等障碍物进行多方面探测。决策系统基于感知数据完成目标检测与跟踪,结合预设作业需求生成比较好航行路线,并具备实时更新路径以实现避碰的能力。控制系统则承担手动与自动模式切换、油门挡位调节、液压转向控制等功能,支持远程遥控与自主航行两种中心操作模式,为海洋牧场各类作业提供稳定的操控支撑。小豚智能无人船在海上作业时,能够自动规避渔船等障碍物,确保航行安全无忧。广东海洋牧场无人船发展

海洋牧场无人船的通信分系统是保障作业顺畅的关键,需构建健壮性强、稳定性好的数据链路。该系统由控制端与执行端通信设备组成,采用微波通信技术实现海面数据传输,针对海上高动态、多径效应突出的环境特点,优化通信协议以提升信号稳定性。在深远海作业场景中,可结合卫星通信技术拓展通信距离,确保岸端与船舶之间的指令传输与数据回传不受距离限制。通信分系统还需具备数据加密功能,保障作业数据的安全性,防止数据泄露或被篡改,为海洋牧场的数字化管理提供安全的数据传输通道。质量海洋牧场无人船常见问题耿博士围绕人工智能的和无人自主驾驶在船泊方面的应用情况向展开了详细的介绍,船舶智能化改造。
海洋牧场无人船在投饵作业中的应用,推动了养殖投喂模式的智能化转型。船舶搭载主用投饵机,可根据预设的时间节点与投饵量自动完成投喂操作,无需人工现场值守。作业时,无人船通过感知系统识别网箱位置,精细停靠至指定区域后启动投饵程序,饲料通过可控式出料装置均匀撒入养殖区域。这种作业模式不*规避了人工投喂受天气、海况限制的问题,还能根据海洋牧场的养殖密度、水质环境等因素灵活调整投喂参数。同时,无人船回传的投喂数据可纳入牧场管理系统,为后续投喂方案的优化提供数据支撑,助力养殖环节的精细化管理。
在生态型海洋牧场建设中,海洋牧场无人船助力实现养殖与生态保护的协同发展。通过精细的环境监测数据,养殖者可及时掌握海域生态变化,调整养殖密度与投喂策略,避免过度养殖对海域环境造成破坏。无人船搭载的垃圾清理设备可及时清理海域内的漂浮垃圾与养殖废弃物,维护海域生态清洁;其非接触式的作业方式也减少了对海洋生物自然生长环境的干扰。此外,无人船获取的长期生态数据可为海洋牧场的生态修复方案制定提供支撑,推动构建“养殖-养护-修复”一体化的生态牧场模式。船舶智能化改造,小豚智能突破船舶智能化过程中数据获取难、指令数据多样、信息显示乱等难题。
人工智能技术在海洋牧场无人船的决策系统中得到广泛应用,明显提升了船舶的自主作业能力。通过深度学习算法,无人船可对大量的环境监测数据、生物活动影像进行分析,实现鱼群饥饿等级识别、死鱼模态特征判断等智能功能。在智能投饵场景中,系统可结合鱼群长势预测模型与实时监测数据,自动调整投喂时间与投喂量;死鱼清理作业中,通过识别死鱼的水纹变化特征,引导水下设备完成精细清理。人工智能技术的融入,使海洋牧场无人船从“被动执行指令”向“主动智能决策”转变,为无人值守养殖模式的实现奠定了基础。面向智慧渔业的自主巡航作业水产无人船河豚-T800,全自主巡航及自动投料/施液功能,船舶智能化改造。上海质量海洋牧场无人船
小豚智能已形成河豚、江豚、海豚系列无人船平台;小豚动力、小豚智控和小豚智讯等功能部件。广东海洋牧场无人船发展
环境监测是海洋牧场无人船的中心作业功能之一,其通过搭载多元化的监测设备,实现对牧场海域环境的多方位感知。船舶配备的水质监测系统可采集水温、溶氧、盐度、pH值等关键水质参数,结合定位装置记录各监测点的坐标信息,通过无线通讯模块实时上传至管控中心。水下摄像头与声呐设备则能捕捉海洋生物的生长视频与活动轨迹,生成包含坐标和水深信息的生物分布量图。这些数据的实时获取,打破了传统海洋牧场环境监测依赖人工采样、数据滞后的局限,为养殖者掌握海域生态变化、调整养殖策略提供了及时的科学依据,助力生态养殖模式的构建。广东海洋牧场无人船发展