普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。为了使直流电动机旋转,需要通过换向器和电刷不断改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。由于电刷要不定期更换、维护,所以为了去掉电刷,无刷直流电动机将电枢放到定子上去,而转子制成永磁体,这样的结构正好和普通直流电动机相反;然而,即使这样改变还不够,因为定子上的电枢通过直流电后,只能产生不变的磁场,电动机依然转不起来。为了使电动机转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置在不断地变化,使定子磁场与转子永磁磁场始终保持左右的空间角,产生转矩推动转子旋转。首先我们来讲一下三辊闸,三辊闸主要适用于人流量相对来说较多的场合,三辊闸的通道宽度大的可达到550mm。伺服式
曾经接触过北京地铁的AFC系统,并简单了解了其维护及拆解结构。照片不能发布到网上给大家看,就用简单的图示来解释一下。车票插入闸机后,回收口触发开关迅速启动马达,从而带动传送带转动。车票接触传送带后就会被“吸”入闸机。由于传送带的速度极快,所以插入票卡会被瞬间吸入,而且不存在吸入之后还可以取出的情况。车票被吸入闸机后,会被读票器识读后消值,整齐地“码”入票箱内。票箱内的票由站务工作人员取出,可重复使用。但是如果插入了错误的票,或其它类似的卡状物体时,读票器识别失败,传送带会倒转而把错误票卡弹出。通道闸电机驱动器品牌自动检票闸机一般可以配双向液晶显示屏,用于显示票信息,而门禁机可以不需要,甚至连指示灯都不可以省掉。
要根据不同车站的流线特点进行闸机结构设计,包括侯捡排队区域的通道设计、机体设计、旅客操作的人机工效设计、旅客引导显示设计等。***,同时要充分考虑无人或少人值守的情况下,如何在结构设计中尽可能强化防尾随进入功能;当发生旅客因各种原因无法顺利通过核验时,人工控制终端如何能及时进行远程协助,减少拥堵的情况发生。主要功能票证核验;人证比对;公安联网;应急处置。为保障涉及旅客个人隐私的票证人信息安全,一是信息经闸机加密模块加密后,经公安专网送到公安业务系统;
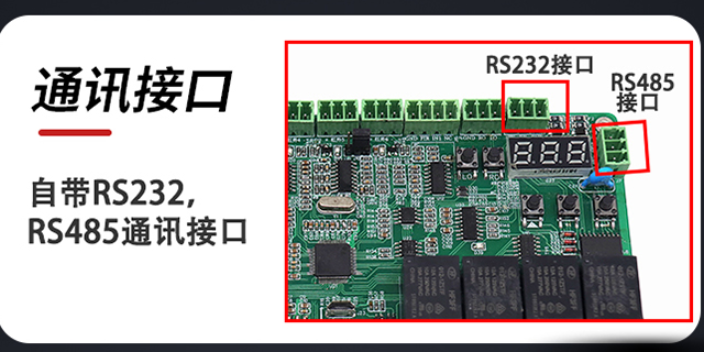
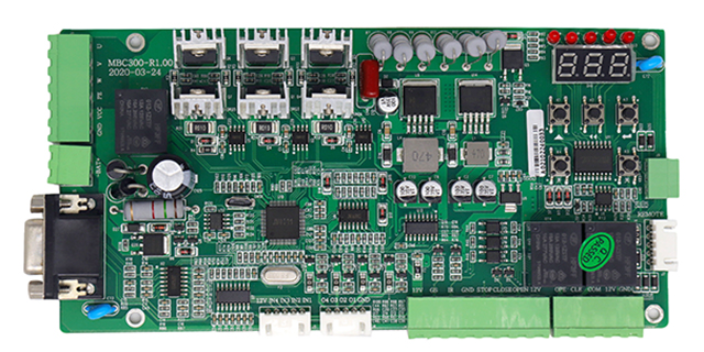
控制模块利用微处理器技术实现对各种电气部件和驱动电机的控制。简单地说,就是控制闸机开关、常开、常关等等状态的主板模块。微处理器一般采用单片机,但如果控制系统比较复杂,或是需要与很多其他系统(包括票务系统、门禁系统等)集成时,并且对响应时间要求很高的情况下,需要采用性能更高的ARM处理器甚至Cortex处理器。简单控制电路一般由主控板、电机控制板及辅助控制板即可实现,复杂控制电路(如地铁检票机)则需要配置专门的工控机来实现。机芯由各种机械部件组成一个整体(包括驱动电机、减速机等),统称机芯,利用机械原理控制拦阻体的开启和关闭动作。影响机芯性能和使用寿命的关键因素包括机械部件的加工工艺和材质,以及**重要的驱动电机和相配套的减速机。驱动电机通常采用直流有刷电机或直流无刷电机。直流有刷电机成本较低,控制技术比较简单,因此被国内闸机厂商***采用,但其中的碳刷属于易损耗件,需要定期维护和更换。机械损耗降低转子、定子损耗和电子铁损,影响伺服电机的工作效率。
智慧车站的进一步改善,智慧车站实名制通道闸机系统如何更好的管理了?1、以人为本的原则。“人”是主体,系统设计应紧紧围绕着人的实际需求,在实用、简便、经济、安全的基础上,满足不同文化层次、不同年龄游客的需要,体现“游”这一特定使用功能。2、可行性和适应性的原则。结合本区的实际,系统要利用先进技术,适应当地旅游事业发展的需要。3、实用性和经济性的原则。系统建设应始终贯彻“面向应用、注重实效”的方针,按照实用、经济的要求进行建设。4、可靠性和稳定性的原则。在考虑技术先进性和开放性的同时,还应从系统结构、技术措施、设备性能、系统管理、厂商技术支持及维修能力等方面着手,确保系统运行的可靠性和稳定性,达到比较大的平均无故障时间。5、安全性和保密性的原则。在系统设计中,既考虑信息资源的充分共享,更要注意信息的保护和隔离,因此系统应分别针对不同的应用和不同的网络通信环境,采取不同的措施,包括系统安全机制、数据存取的权限控制等。智能的闸机驱动器助力打造便捷的通行环境。伺服式
人行通道闸机系统可以对通过通道的人员进行24小时的监控,可以在录像回放时也会显示这个人相关详细信息。伺服式
伺服电机编码器的调整方法:增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;2.用示波器观察编码器的U相信号和Z信号;3.调整编码器转轴与电机轴的相对位置;4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。伺服式