门禁翼闸优势门禁翼闸优势:在所有的门禁闸机中,翼闸,一直都是很多客户朋友的优先产品。翼闸具有独特的优势,外型美观、通行速度快,而且,对于人员的验证也极为的一款闸机。在很多地方,翼闸都是必不可少的。【翼闸优势】1、通行速度较三辊闸更快的。2、通道宽介于三辊闸和摆闸之间,一般在550mm-900mm之间。3、外观形态比较美观,翼闸的材料比较丰富。4、紧急情况下闸翼会快速缩回箱体中,可以很方便的形成无障碍通道,提高通行速度,易于行人疏散。摆闸如今成为占据人行通道闸机市场的主要产品,摆闸不仅能快速通行,而且还美观大方,所以才受到市场认可。深圳驱动器参数表
闸机出现方便了人类的生活,伴随着以高铁铁路客运发送量的快速增长,客运站在旅客实名制查验环节存在问题日益凸显,包括:人、证核实难度大,票、证、人一致性准确率低、运营成本高、旅客体验差等问题。特别是反恐法正式颁布之后,客运站安保等级越来越高、要求越来越严,面对新形势、新要求,如何借助智能科技手段,实现保安全、提质量、促生产、降成本的目标,成为现实而迫切的难题。我们门霸科技有限公司在通道闸机方面有十几年的行业经验。深圳驱动器报警a840随着伺服系统的大规模应用,伺服驱动器使用、伺服驱动器调试。
随着各大高校不断加强和改进学生公寓的管理工作的加大,高校后勤社会化**成为必然趋势。尤其是对学生公寓的出入管理、归寝管理、安全管理,使用现代技术的加入成为必然。比如出入口管理的通道翼闸,就是高校比较好的安全帮手。
公寓出入口人流量大,考勤管理困难,管理人员查寝耗费时间并且工作量大,指纹、刷卡考勤门禁闸机进行公寓出入口管理,是否合理。一般情况下,一座公寓楼会有上千人左右的学生入住。而又加之很多高校的公寓楼建筑年代久远,出入口往往较窄。用指纹、刷卡等普通的考勤方式代理管理人员查岗容易造成公寓出入口拥堵,尤其是上下课的高峰期,每分钟每个门可能会有近百人以上的学生通过,公寓出入口人流量剧增,具有安全隐患。
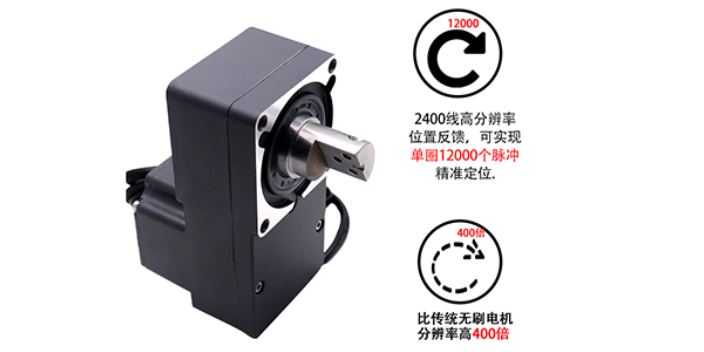
人行通道闸机三辊闸属于出入口控制类产品之一,又叫做人行通道闸、三棍闸,其应用**为“一次通过一人,有效防尾随”。人行通道闸机三辊闸还可以集成“门禁系统”、“访客系统”和“票务系统”,来实现对人员出入的管理,提升安保区实体防护的能力。下面,三辊闸厂家畅荧智能来为大家介绍人行通道闸机三辊闸的安全性。人行通道闸机三辊闸的安全性:1、高安全的人员通行保障人行通道闸机三辊闸可以对人员运动轨迹和行为进行识别探测,对非法进入的人员实行防夹机制,还具备紧急情况下的应急响应处理机制,从而提高人员通行的安全保障。2、高等级的安全防范级别人行通道闸机三辊闸对非法进入的人员进行探测、阻止,还具备报警处理机制通知管理员,防止出现人员尾随等现象的发生,从而提高安保区域的安全防范级别。3、可靠持久的运行能力人行通道闸机三辊闸采用直流无刷驱动技术,运行速度快、无机械损耗、定位精细,通行时间短,通行率可达到每分钟60人,无故障运行的次数一般不低于300万次。说到伺服电机的工作效率,其实在一开始的设计选型时候,就已经确定了这个伺服电机的工作效率范围了。

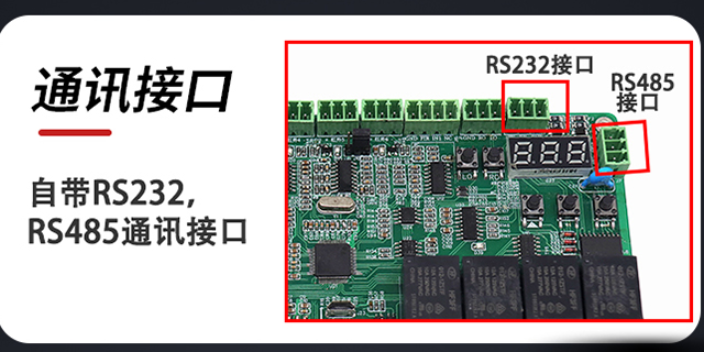
伺服驱动器控制信号接线及功能说明驱动的脉冲指令输入方式可能有三种:(1)差分驱动输入方式;脉冲输入比较大频率500KHZ(2)集电极开来输入方式;脉冲输入量比较大频率200KHZ(3)高速差分驱动输入方式;脉冲输入量比较大频率4MHZ驱动器的脉冲指令输入形式也有三种:(1)方向+脉冲(2)A,B相正交脉冲(3)CW/CCW正传/反转脉冲上位机(PLC)两差分输出直接与驱动器的PULS+,PULS-和SIGN+,SIGN-相连接,通过200Ω的电阻,光耦接口电路输入给伺服驱动器。上位机和两底线相连。上位机(PLC)以集电极开路方式输出脉冲指令的接线方式道闸遥控器和传统意义上遥控器产品相似,具有便携的功能优势,并且在实际使用方面的操作也十分简单.深圳驱动器参数表
合金铝或不锈钢的全防雨箱体,相对于通功能的翼闸摆闸等人行通道设备,三辊闸更加物美价廉。深圳驱动器参数表
伺服电机编码器的调整方法:增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;2.用示波器观察编码器的U相信号和Z信号;3.调整编码器转轴与电机轴的相对位置;4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。深圳驱动器参数表