普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。为了使直流电动机旋转,需要通过换向器和电刷不断改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。由于电刷要不定期更换、维护,所以为了去掉电刷,无刷直流电动机将电枢放到定子上去,而转子制成永磁体,这样的结构正好和普通直流电动机相反;然而,即使这样改变还不够,因为定子上的电枢通过直流电后,只能产生不变的磁场,电动机依然转不起来。为了使电动机转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置在不断地变化,使定子磁场与转子永磁磁场始终保持左右的空间角,产生转矩推动转子旋转。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。伺服驱动器没有使能怎么解决

小区适合用什么通道闸如今随着小区在安防上的不断投入,小区通道闸的选择也成了,安防重要的一块。但是小区该如何选择通道闸,门霸科技给大家聊聊小区通道闸的选择。目前小区通道闸一般在使用三种闸机摆闸翼闸三辊闸。小区可以根据自身的特点去选择,主要标准就是单一过人还是人车混合通道。单一过人可选择三辊闸或者翼闸。如果在完全露天环境下比较好使用三辊闸。因为翼闸的防水功能不是很好,当遇到下雨的时候翼闸双翼在打开或者关闭的时候会把雨水带进机箱影响机器的正常使用。闸机伺服驱动器图片凡是对位置,速度和力矩的控制精度要求比较高的场合,都可以采用交流伺服驱动。

二、定位置布线根据以前确定的方案,明确三辊闸机的安装具体尺寸,做好预埋管,闸机与闸机之间留50-100mm的间隙,能打开上盖以防调整机器,维修等,千万不能不留空隙,闸机与闸机之间预埋2根6分-8分的塑胶管,一根胶管走电源线(强电),另一根胶管走信号线(弱电),不能将电源线和信号线同时走一个胶管,这样会影响到通讯的效果,预埋管要露出地面30-40mm高,走线立式三辊闸机应在机器中间底部为好,桥式三辊闸机应在两侧面为好(因为桥式三辊闸机中间底部为封闭式)。三、固定调整固定底部用4-M10x100的膨胀螺丝固定,不能摇摆,整机水平,外观整体一致,(固定前比较好用细线拉直线,纵横向一致),三辊闸机与三辊闸机之间采用串联方式,逐一调整,直线能正常使用。
人行通道闸机三辊闸属于出入口控制类产品之一,又叫做人行通道闸、三棍闸,其应用**为“一次通过一人,有效防尾随”。人行通道闸机三辊闸还可以集成“门禁系统”、“访客系统”和“票务系统”,来实现对人员出入的管理,提升安保区实体防护的能力。下面,三辊闸厂家畅荧智能来为大家介绍人行通道闸机三辊闸的安全性。人行通道闸机三辊闸的安全性:1、高安全的人员通行保障人行通道闸机三辊闸可以对人员运动轨迹和行为进行识别探测,对非法进入的人员实行防夹机制,还具备紧急情况下的应急响应处理机制,从而提高人员通行的安全保障。2、高等级的安全防范级别人行通道闸机三辊闸对非法进入的人员进行探测、阻止,还具备报警处理机制通知管理员,防止出现人员尾随等现象的发生,从而提高安保区域的安全防范级别。3、可靠持久的运行能力人行通道闸机三辊闸采用直流无刷驱动技术,运行速度快、无机械损耗、定位精细,通行时间短,通行率可达到每分钟60人,无故障运行的次数一般不低于300万次。智能的闸机驱动器为用户带来良好的使用体验。
【翼闸劣势】
1、控制方式比较复杂,成本较高。
2、翼闸防水防尘能力不足,一般建议适用于室内,如果用在室外使用翼闸必需加雨棚。
翼闸应用场合
翼闸门禁闸机适用于人流量较大的室内场合,如地铁、火车站检票处,工厂场馆、小区、学校、景区等地点。也适用于对美观度要求较高的场合。 翼闸门禁闸机的优劣势解析。对于翼闸门禁闸机这一闸机产品,它的优劣,我们通过上面的介绍大概也都有了一定的了解了。对此,闸机厂家创新通科技告诉大家,闸机的选择,一定要根据该场所的环境和需要来选,这样才能够保证闸机的运行平稳以及工作效率。 将电脉冲信号转换成相应角位移或线位移,每输入一个脉冲信号,转子就转动一个角度或前进一步。伺服控制器报警
三辊闸按外形可分为:立式和桥式两种。伺服驱动器没有使能怎么解决
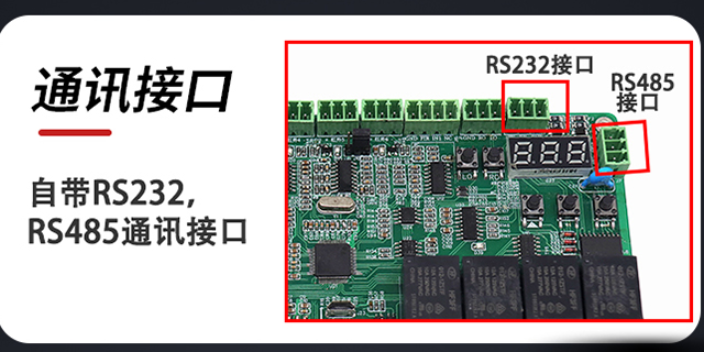
伺服系统的比较大特色:透过回馈信号的控制方式〔可做指令值与目标值的比较,因而大幅减少误差状况〕。何谓回馈信号:向控制对象下达指令后,正确的追踪并查明现在值,且随时回馈控制内容的偏差值、待目标物到达目的地后,回馈位置值,如此反复动作。控制流程:检测机械本体之位置检出,回路为封闭系统,称之为全闭回路。相反,检测马达轴端之回路系统就称为半闭回路。伺服驱动器的内部构成整流部:通过整流部,将交流电源变为直流电源,经电容滤波,产生平稳无脉动的直流电源。逆变部:由控制部过来的SPWM信号,驱动IGBT,将直流电源变为SPWM波形,以驱动伺服电机。控制部分:伺服单元采用全数字化结构,通过高性能的硬件支持,实现闭环控制的软件化,现在所有的伺服已采用(DSP数字信号处理)芯片,DSP,能够执行位置、速度、转矩和电流控制器的功能。给出PWM信号控制信号作用于功率驱动单元,并能够接收处理位置与电流反馈,具有通讯接口。编码器:伺服电机配有高性能的转角测量编码器,可以精确测量转子的位置与电机的转速。伺服驱动器没有使能怎么解决