涂胶设备通过优化线胶速度与胶线径的匹配关系,在保证涂胶质量的前提下,可缩短涂胶时间,为 CT 时间 <45S 提供关键支撑。线胶速度与胶线径的匹配需遵循 “流量平衡” 原则:出胶流量 = 线胶速度 × 胶线截面积(πr²,r 为胶线径 / 2),确保在不同速度下,出胶流量与胶线截面积的比值恒定,避免胶线过细或过粗。设备内置 “速度 - 线径” 匹配表,预设常用组合参数,如线胶速度 250mm/s 对应胶线径 2-3mm(出胶流量约 0.1-0.2mL/s),300mm/s 对应 3-5mm(0.2-0.5mL/s),400mm/s 对应 5-8mm(0.5-1.0mL/s)。例如汽车门板的大面积涂胶(胶线径 6mm),选择线胶速度 400mm/s,出胶流量约 0.9mL/s,涂胶长度 1.5m 只需 3.75 秒;汽车立柱的精细涂胶(胶线径 2mm),选择 250mm/s,出胶流量约 0.08mL/s,涂胶长度 0.8m 需 3.2 秒。这种匹配关系还能减少 PUR 胶的浪费,如胶线径 8mm 时若选择低线胶速度 250mm/s,会导致单位长度出胶量过多(1.2mL/m),超出粘接需求;选择 400mm/s 时,单位长度出胶量降至 0.8mL/m,刚好满足强度粘接高的需求。伺服压合压力精度达 ±0.1N,涂胶设备确保汽车内饰件 PUR 粘接压力均匀。直销涂胶设备价格实惠
涂胶设备的 RobotStudio 离线编程功能支持 “涂胶工艺参数仿真”,可在虚拟环境中模拟不同涂胶参数(线胶速度、胶线径、出胶量)对胶线质量的影响,提前优化工艺参数,减少实际试错成本。软件内置 PUR 热熔胶的 “流体仿真模块”,可模拟胶水在不同参数下的流动状态、胶线形态(宽度、厚度、连续性)与固化过程:例如模拟线胶速度 300mm/s、胶线径 5mm 时,胶线是否存在断点;模拟出胶量 10g / 件、压合时间 12 秒时,粘接面的胶水覆盖率是否达标。操作人员可在虚拟环境中测试多种参数组合,选择合适的方案,再应用到实际生产中,避免传统 “试错法” 导致的材料浪费(如每测试 1 组参数需消耗 50-100g PUR 热熔胶)与时间浪费(每测试 1 组参数需 30-60 分钟)。以某新车型塑料立柱的粘接工艺优化为例,通过 RobotStudio 仿真测试了 5 组参数组合,只用 2 小时就确定了合适参数(线胶速度 320mm/s、胶线径 4mm、出胶量 8.5g);若采用传统试错法,需测试 10 组参数,消耗 1kg 胶水,耗时 5 小时。涂胶工艺参数仿真功能使新车型工艺开发周期从 1 周缩短至 3 天,材料浪费减少 60%,降低了新产品导入的成本与风险。直销涂胶设备价格实惠汽车内饰件涂胶设备用 RobotStudio 离线编程,模拟 PUR 热熔胶涂胶路径,提升效率。
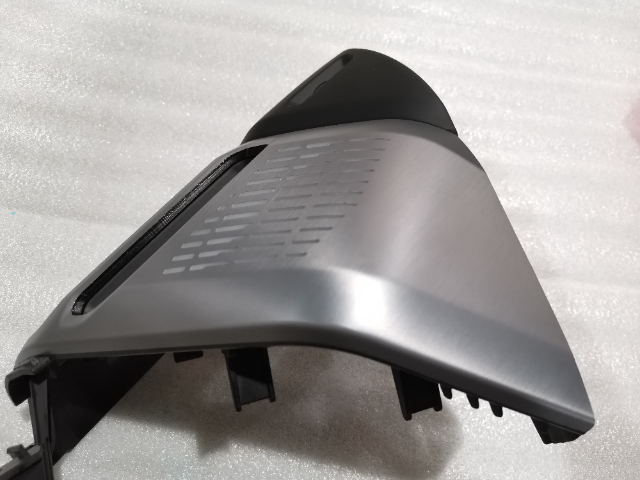
涂胶设备胶线径的选择需结合内饰件的受力情况与环境要求:例如汽车门板的受力部位(如扶手下方)需 8mm 粗胶线,确保剥离力≥10N/25mm;非受力部位(如装饰亮条)需 2mm 细胶线,满足外观要求即可。设备配备 8 套不同口径的喷嘴(1mm、1.2mm、1.5mm、2mm、2.5mm、3mm、3.5mm、4mm),喷嘴更换采用快换接口,更换时间≤2 分钟,同时系统内置 “胶线径 - 喷嘴 - 流量 - 速度” 匹配数据库,操作人员只需输入目标胶线径(如 6mm),系统自动推荐喷嘴口径(2.5mm)、线胶速度(350mm/s)与出胶流量(10cm³/min),无需手动计算。以某车型塑料立柱与顶棚的粘接为例,立柱边缘需 3mm 细胶线(避免溢胶污染顶棚面料),立柱中部需 6mm 粗胶线(确保结构强度),设备通过更换喷嘴(1.5mm→2.5mm)并调用对应参数,在同一产品上实现两种胶线径的涂覆,粘接后边缘溢胶率 0.3%,中部剥离力 9.8N/25mm,完全满足设计要求。
涂胶设备的双工位交叉单独工作台采用 “抗振动设计”,通过减震脚垫与刚性框架结合,减少设备运行过程中的振动对涂胶与压合精度的影响,尤其适配车间内多设备同时运行的环境(易产生共振)。工作台框架采用强度高的铝合金型材(型号 6061-T6),经过时效处理,刚性提升 30%,可有效抑制振动传导;工作台底部安装 4 个充气式减震脚垫(阻尼系数 0.3,承载能力 500kg / 个),可根据车间地面平整度调整高度(调整范围 ±10mm),并吸收外部振动(如相邻冲压设备产生的 10Hz 振动)。当设备运行时(机器人运动速度 400mm/s,伺服压合速度 50mm/s),工作台的振动振幅控制在 0.01mm 以内,远低于影响胶线精度的阈值(0.05mm)。在某车间的振动测试中,未采用抗振动设计的工作台振动振幅达 0.08mm,导致胶线径偏差达 0.3mm(超出 0.2mm 的允许范围);采用抗振动设计后,振幅降至 0.01mm,胶线径偏差≤0.1mm,出胶重量精度误差控制在 3% 以内。此外,工作台还配备振动监测传感器,当外部振动超过安全阈值(如振幅 0.05mm)时,系统发出报警并降低机器人运动速度(如从 400mm/s 降至 300mm/s),进一步确保涂胶精度。涂胶设备胶线径可小至 2mm,可满足汽车内饰件精细部位的 PUR 涂胶需求。

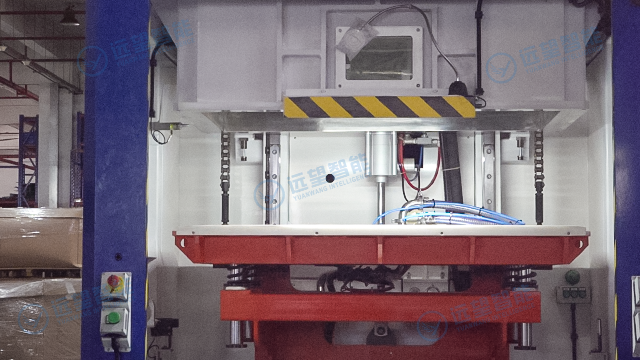
涂胶设备的伺服压合机构支持 “压合参数的闭环自学习” 功能,通过分析多件产品的压合数据,自动优化压合参数,提升压合质量的稳定性。系统在生产初期采用预设的压合参数(如压力 120N、时间 12 秒),同时记录每件产品的压合位移、压力曲线与剥离力(抽样检测);通过算法分析这些数据,若发现剥离力普遍偏低(如≤8N/25mm),且压合位移偏小(如≤1.8mm),自动将压合压力提升 5%-10%(如从 120N 升至 126-132N)或压合时间延长 1-2 秒;若发现剥离力普遍偏高(如≥10N/25mm),但内饰件变形率增加(如≥0.2%),自动将压合压力降低 3%-5%(如从 120N 降至 116-117N)。自学习功能每生产 50 件产品进行一次参数优化,直至剥离力稳定在目标范围(如 8.5-9.5N/25mm),且变形率≤0.1%。CT 时间 < 45S 的涂胶设备,满足汽车内饰件 PUR 热熔胶粘接的高节拍需求。国产涂胶设备定制价格
红外保温功能让涂胶设备的 PUR 热熔胶始终处于合适的涂胶温度范围。直销涂胶设备价格实惠
涂胶设备的伺服压合机构采用 “多位置压合” 功能,可根据汽车内饰件的粘接面形状,在不同位置设定不同的压合力与压合时间,确保复杂粘接面的每一个区域都充分压合。机构的压头支持多段式压合路径,例如针对带有凸起结构的塑料门板(凸起高度 5mm),可设定 3 个压合位置:位置 1(凸起周边)压合力 120N、时间 5 秒;位置 2(凸起顶部)压合力 150N、时间 8 秒;位置 3(门板平面区域)压合力 100N、时间 5 秒。压合时,伺服电机驱动压头依次移动至各位置,执行对应的压合参数,确保凸起区域与平面区域均充分粘接,避免凸起区域压合不足(剥离力低)或平面区域压合过度(变形)。多位置压合参数可通过 RobotStudio 离线编程设定,或在人机界面手动输入,系统支持存储 15 组多位置压合程序,适配不同复杂结构的内饰件。以某车型塑料立柱的粘接为例,立柱带有 2 个卡扣凸起(高度 3mm),采用多位置压合后,卡扣区域的剥离力从 8.2N/25mm 提升至 9.8N/25mm,平面区域的变形率从 0.15% 降至 0.08%,完全满足设计要求;而采用单一位置压合时,卡扣区域剥离力只 7.5N/25mm,平面区域变形率 0.2%。多位置压合功能使设备可适配复杂结构内饰件的粘接需求,拓展了设备的应用范围。直销涂胶设备价格实惠