宝利苏迪定子屏蔽套环缝焊接机器人成套设备中,焊接机头是焊接动作的执行机构,可实现焊枪上下位移、焊枪角度调整、送丝等功能动作,主要结构由以下几个部分组成:焊枪、AVC滑块机构、送丝机构、电缆接口集成。焊枪为直式水冷自动TIG焊枪,焊枪采用循环水冷却,若水冷系统发生故障,设备具有报警功能。焊枪配有送丝支架,焊丝位置可通过送丝两坐标装置进行调整。AVC滑块是电弧电压自动控制功能的执行机构,在非焊接时可实现焊枪位置在焊缝高度方向的精细调整,焊接时保持焊接弧长一致。宝利苏迪阀壳自动焊设备用于阀壳与气缸之间对接环焊缝横焊位置的自动窄间隙氩弧焊接。福建定子屏蔽套环缝焊接机器人堆焊设备

为实现多机头协同高效焊接及自动清理、焊缝检查全流程智能化的目标,宝利苏迪设计开发了换热器的管子-管板接头多机头协同智能化焊接机器人系统,该焊接机器人系统具备四机头协同焊接功能、焊缝自动清理功能、焊缝外观质量自动检测功能及焊接质量全过程数字化管理功能。实现了路径规划、管孔定位、焊接、表面清理和检查的全流程自动化,大幅降低人因影响,显著提高焊接效率和质量稳定性。全过程智能化管子-管板焊接机器人具有多个机头和机械臂协同多线作业,相比传统的手持式焊枪焊接,效率得到了极大的提升。青海窄间隙焊接机器人焊接设备生产厂家宝利苏迪机器人焊接机头前端加装视觉系统,焊接过程中可实时对电弧及焊缝成型进行图像采集,监视焊缝状态。

宝利苏迪自动堆焊设备堆焊机器人的控制系统具有安全功能,具有紧急停止,自动模式停止,测试模式停止等。堆焊机器人具有监控系统,主要包括机器人本体和焊接状态监控。机器人本体的监控主要包括状态和位置信息,机器人的监控变量可编辑或增加。可通过软件直接控制机器人的运行和启动,并可以指定机器人运行的程序。焊接机器人控制系统可根据设备的活动空间和活动轨迹进行运动方式和动作位置编程。如焊接过程意外中断停止后,焊接机器人控制系统可通过报警等方式通知操作人员,人为干预处理,处理后,按原设定程序继续焊接工作。
宝利苏迪多机器人管板自动焊接设备由4套6轴机器人系统,4套管子管板焊接机头、焊接电源、4套钨极自动更换系统,控制系统等部分组成。该多机器人管板自动焊机系统用于换热器产品中换热管与管板焊缝的焊接。焊接方法为TIG钨极氩弧焊,焊接形式包括自熔焊,填丝焊及自熔焊与填丝焊的组合焊接。6轴工业机器人可安全平稳地承载焊接机头,在保证负载的前提下,避免相互运动过程中机器人互相碰撞。多机头分工作业,互不干涉,可按照图纸要求及系统划分在划分区域内工作。宝利苏迪管板焊接机器人由焊接控制系统控制焊接机头,按预定焊接程序完成管板自动焊接。

宝利苏迪机器人TIG焊接系统配备数据采集系统,由数据采集卡,数据采集仪等部分组成。其中数据采集卡安装于焊接电源中,直接采集焊接电源的各项参数发送给数据采集仪。数据采集仪进行信号转化,与电脑连接,电脑安装有**软件,可将采集数据形象的显示在屏幕上,并提供存储和打印等功能。在焊接过程中可采集焊接电流,电压,焊接速度,保护气流量等焊接参数的实时数据,自动生成参数曲线。实时数据采集系统还具备焊接参数监控和报警功能。宝利苏迪管板堆焊机器人设备由焊接机头,电源,机器人,操作架,地轨,回转台,焊缝激光清洗设备组成。中国澳门零部件焊接机器人焊接设备制造商
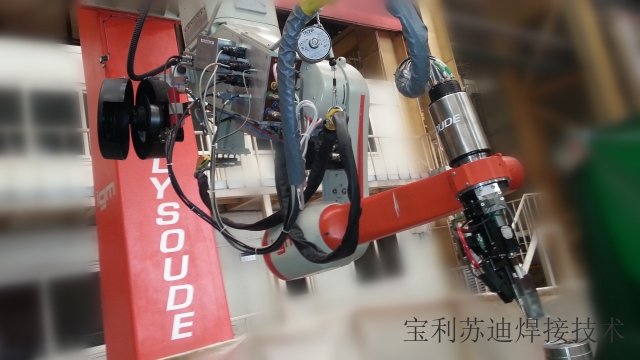
宝利苏迪机器人焊接机头安装于机器人端部,由焊枪,送丝机构,焊枪接口板,线束等构成。福建定子屏蔽套环缝焊接机器人堆焊设备
宝利苏迪RTS管板机器人焊接系统,石化换热器管板焊接机器人的技术特性如下:配备有多功能机器人管板自动焊接机头;采用焊接机头直接对中定位技术,对中结果实时可见,闭环控制,对中精度可达±0.05mm,并缩短焊接间隔,提升工作节拍;管板焊接机头含全伺服AVC轴、摆动轴,可实时反馈钨极位置,实现自动跟踪及调节;特殊设计的保护气路及保护气罩。可实现封闭式气体保护效果,特别适用于镍基合金、钛合金、铜镍合金等特种材料的管板焊接要求;自主开发RTS软件,管孔CAD图纸一键导入,管孔焊接顺序自动规划,可满足各种特殊工件、特殊工艺的焊接顺序排布需求;智能定位系统可实现毫秒级反馈定位偏差,并快速响应完成对中;数据实时采集系统、焊接过程可视化系统以及焊接报告集中显示。福建定子屏蔽套环缝焊接机器人堆焊设备