宝利苏迪机器人焊接系统可用于AP1000核电反应堆压力容器顶盖与CRDM管座之间J型接头镍基隔离层堆焊和窄间隙对接应用。设备包括自动TIG焊接系统和机器人整合成套系统,焊接电源,TIG焊接机头,工业机器人,机器人配套设备,机器人控制系统等。焊接方法为TIG加丝自动焊。适用材料:碳钢,低合金钢,不锈钢和镍基合金钢等。焊接机头安装于机器人端部,由焊枪,送丝机构,焊枪接口板,线束组成。电源采用宝利苏迪Polysoude PC600焊接电源,机器人6轴外壳采用铝合金铸造结构,可方便的直立或悬挂安装使用。机器人专为弧焊设计,独特的机械结构设计为在狭窄空间内或环形焊缝的焊接创造了优异性能。宝利苏迪管板机器人焊接设备具有钨极自动更换系统,配合机器人完成钨极的自动更换动作。浙江换热管与管板焊接机器人焊接系统

宝利苏迪机器人TIG焊接系统为适应机器人自动定子线圈水接头焊接的需求,对焊炬进行了相应非标设计,同时加装机器人夹持接口和AVC滑块,机器人夹持接口便于与机器人手臂快速连接且精度可靠,AVC滑块可有效避免水接头处管子的距离误差不均匀等问题。非标设计后的焊炬可以配合钨极自动更换系统实现钨极的自动更换。机头前端加装视觉系统和焊接摄像头,焊接摄像头外部设计有水冷壳,运行过程中全程水冷,用来实现视觉精细定位线圈水接头位置和焊接过程中可实时对电弧及焊缝成型进行图像采集,监视焊缝状态。中国台湾自动堆焊机器人窄间隙焊接设备宝利苏迪堆焊机器人具有激光清理装置,用于堆焊过程中的层道间清理。

宝利苏迪机器人管板焊接系统,每台机器人及焊接机头配备一个高清摄像头对每台焊接机头的钨极尖部和焊后的焊缝成型在计算机屏幕上进行观察。观察位置无遮挡,可观察管子管板焊缝位置焊前、焊后的全貌,便于设备操作者观察。对焊接中各状态显示不同颜色。通过智能定位系统对管板焊接位置进行扫描定位,保证在其余工业机器人运动时,仍保持焊接机头高精度的可靠定位,确保定位精度。工件定位后,机器人通过智能定位系统引导,自动寻找工件参考点,计算并建立坐标系。
宝利苏迪POLYSOUDE悬吊管托块焊接机器人设备可根据具体产品焊缝要求,实现单层或多层多道热丝TIG焊。焊缝根部完全熔透。托块端部可实现包角焊接。焊缝表面经PT检验合格。焊接过程中可对焊接工艺参数(焊接电流,焊接电压,焊接速度,摆动速度,摆幅,送丝速度,热丝电流等)进行调整。焊枪轨迹设定界面要求简单方便、人机操作友好,能实现典型悬吊管托块结构图形关键参数设定的可视化。悬吊管夹持装置在旋转过程中可无级调速,无抖动现象。自动钨极更换装置可实现规定时间人为、控制更换钨极两种模式。宝利苏迪热丝TIG窄间隙焊枪具有钨极摆动功能,钨极摆动宽度,摆动速度,坡口两侧停留时间可编程控制。
宝利苏迪窄间隙机器人TIG焊接系统具有激光跟踪系统,采用宝利苏迪自有的焊缝跟踪系统,搭配窄间隙焊枪实现自动寻位功能,确保焊接精度与效率。送丝系统包括送丝驱动马达,送丝导管,导丝嘴以及焊丝位置调节机构。六轴工业机器人可对外部轴进行联控,可与行走机构实现联动控制。机器人具有防碰撞功能,具有弧焊系统。设备配备有行走机构,包含可旋转升降的立柱,搭载工业机器人移动,确保机器人运动平稳。设备提供外置冷水箱用于焊枪的冷却。宝利苏迪提供多机器人管板自动焊接设备,由4套6轴机器人系统,4套管子管板焊接系统组成。天津零部件焊接机器人焊接设备制造商
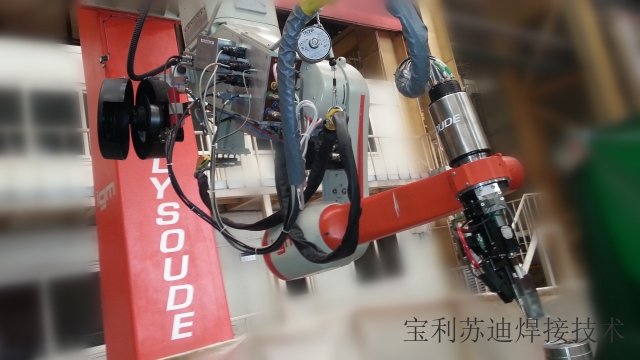
宝利苏迪管板焊接机器人由焊接控制系统控制焊接机头,按预定焊接程序完成管板自动焊接。浙江换热管与管板焊接机器人焊接系统
宝利苏迪POLYSOUDE换热器管板氩弧机器人焊接设备由以下部分组成:管板直流逆变焊接电源P6,全自动氩弧管板焊接机头,工业机器人,控制系统,摄像监控系统,智能识别定位系统,钨极自动更换系统,实时数据采集系统,焊缝成型检测系统等。设备具有焊接完成后的焊缝质量自动检测功能,初步实现气孔、咬边、管孔直径等质量检测能力;设备具有标准通讯接口,具有并实现焊接参数采集和上传,能实现远程控制和监控功能;能实现设备之间的通讯,便于多机协同同时协助工作。浙江换热管与管板焊接机器人焊接系统



