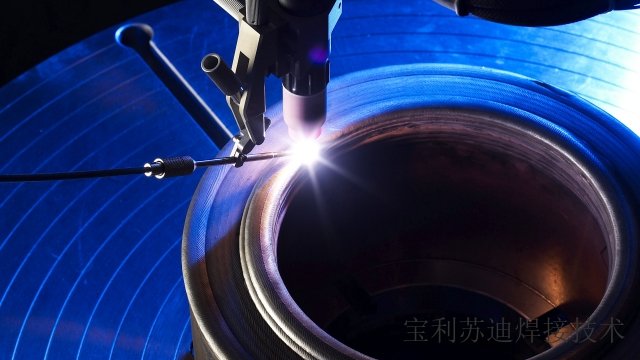
·宝利苏迪另外一种主要的堆焊形式为垂直堆焊,例如弯头内壁堆焊,三通,法兰,阀门TIG堆焊等。为垂直位置(2G)而设计的解决方案通常是用来堆焊圆柱形部件。大多数情况下工件由转台或变位机定位,针对这些应用,POLYSOUDE宝利苏迪焊接技术设计出了一系列的无限回转焊接和堆焊机头,无限旋转机头分为上部旋转机构部分和下部焊接机构部分:旋转机构与操作架安装板连接固定不动;焊接机构部分分为焊接各项功能的执行机构,由旋转机构驱动旋转。无限旋转机头实现无限制连续焊接。宝利苏迪自动堆焊设备可用于人孔内壁、密封面不锈钢堆焊,管接头端部隔离层堆焊。四川自动表面堆焊单元
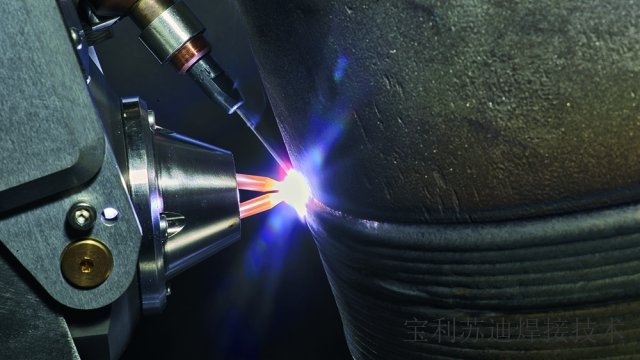
宝利苏迪自动氩弧堆焊设备可用于蒸发器、换热器管板耐腐蚀堆焊。该耐腐蚀堆焊设备,管板堆焊机器人设备包含焊接机头,电源,机器人,操作架,地轨,会转台以及焊缝激光清洗设备。水平回转台可参与机器人编程联动。堆焊机器人采用六轴工业机器人,搭配操作架,能精确定位焊枪位置,实现任意位置的焊接堆焊。该堆焊设备配备了智能焊接系统,熔池检测系统,焊缝清理系统及集中控制系统。焊接方法:双钨极热丝TIG焊。堆焊材料:不锈钢或镍基合金。江苏自动表面堆焊机器人TIG焊接包括冷丝和热丝工艺,热丝工艺使用单独电源用于焊丝加热,从而提高了堆焊熔敷率。

在焊接之外,AVC滑块用于焊枪定位或准备起弧。自动焊接的第一步是通过AVC滑动运动使电极接触工件。接触点是通过电极和工件之间的闭合回路来检测的。摆动滑块,在较少情况下用于焊接前的定位,只有当需要一个或两个参考边时才需要(例如,在凹槽中心定位或相对于参考面进行定位)。在焊接过程中,摆动滑块可能与焊接电流同步进行振荡运动,或使轨迹被重置或偏移(例如步进)。摆动功能需保证摆动的高精度和高稳定性,可以和焊接电流脉冲同步运动来保证厚壁情况下的侧壁熔合,支持对填充及盖面情况多种摆动模式控制。
宝利苏迪POLYSOUDE自动堆焊设备,内孔堆焊设备摄像监控系统包括:水冷焊接摄像头,视频监视器,单独的控制系统,信号放大器及电缆束等。该系统可以用与焊前焊枪的辅助定位,焊接时焊接状态监控,可实现远程控制功能,尤其适用于空间位置受限,不便于直接观察的焊接位置,可同时清晰拍摄电弧形态、焊缝熔池界面、焊丝送进情况和焊缝成形。焊接时操作人员可根据视频监控系统人工通过遥控器远程调节焊枪相对坡口的位置。根据多年内孔堆焊应用经验,在焊枪整合高清摄像头是非常有必要的。焊接摄像头能起到帮助焊工判断在焊接过程中判断填充金属的熔敷效果,侧壁的熔合效果的作用。变位机由卡盘和变位器组成,主要完成对工件的转动、支撑和位置变换。

管道氩弧堆焊需要多层熔敷,通常是两层,但对于某些关键行业来说可能需要三层以上。在此过程中,稀释的控制非常重要。稀释率过高可能导致裂纹或组织转变(如奥氏体转马氏体)。管道氩弧堆焊遇到的主要困难是控制稀释率,以保证熔敷物的化学成分。实际上,用于堆焊的合金大多情况下只有在非稀释条件才能保证性能,这意味着需要保持与等级分类相对应的化学成分。然而,焊接操作时,填充焊丝完全熔化并沉积在母材上,母材在电弧的影响下本身也发生了熔化。堆焊操作后形成的稀释率是由填充金属和母材的混合物来定义的。在熔化*少量的母材与确保母材与熔敷层结合质量之间寻找折衷方案仍然是工艺的主要难点,需要在熔敷层的致密性和化学成分之间取得平衡。宝利苏迪提供耐磨堆焊设备、耐腐蚀堆焊设备,防腐堆焊设备、维修堆焊设备,堆焊机器人设备。江西耐磨堆焊机器人
宝利苏迪旋转头架用于在焊接过程中夹持工件,并带动工件进行旋转运动。四川自动表面堆焊单元
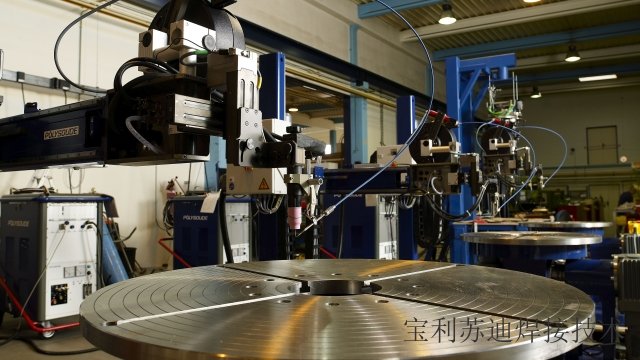
宝利苏迪POLYSOUDE自动氩弧堆焊设备包含水平回转台,满足筒体及法兰的装卡,固定,定位,满足筒体密封面及法兰密封面全部堆焊区域的堆焊需求。水平回转台包含底座,回转驱动装置,工作台,导电装置,润滑系统,控制系统等组件。焊接回转平台需要满足承重要求。底座重心稳定,具有较好的刚性,保证长期使用不变形。回转驱动需具备一定范围内的无极调速功能。工作台由碳素钢焊接成形并热处理后加工,台面有放射状的T形槽,用于安装工件调心调平和固定位置。台面留有中心孔,用于线缆和气管布置通道。防止电缆缠绕,有焊接地线转动滑环机构。四川自动表面堆焊单元