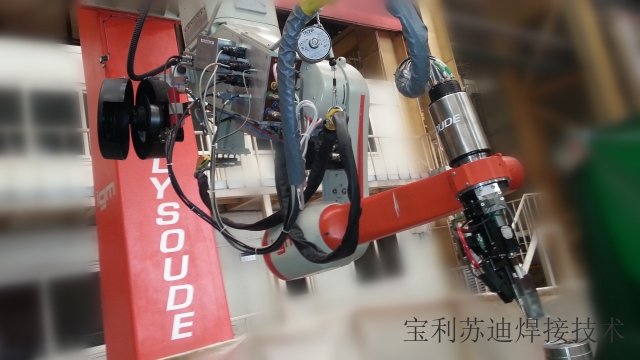
宝利苏迪POLYSOUDE自成立以来,一直在保证质量的前提下,降低广大客户的设备采购成本。二十余年来,我们坚持从以下方面加以探索和努力,按时、高质地完成订单交货的同时,确保了宝利苏迪与其他自动氩弧焊接设备厂家相比,有竞争力的价格体系。在设计方面,我们采用经验证的标准化模块,既有针对性非标设计,大量采用经验证的引用标准化设计,成熟稳定、技术风险小,给批量化制造提供基础。在管理方面,定制化制造,设置较少库存,公司内总装测试时间短,流转速度快,对固定资产占用小。在生产成本方面,我们与国内广大供应厂商展开***合作:依托国内全产业链和批量化标准化优势,控制标准件外购成本;加工件外协,我们则注重长期合作供应商的开发管理,标准化模块批量下单;另外公司内部配备大量有经验的装配测试人员,效率高、返修率低,从而降低生产成本宝利苏迪主管道机器人焊接系统焊接过程中可采集焊接电流,焊接电压,焊接速度,送丝速度等。河北堆焊机器人TIG堆焊单元
宝利苏迪定子屏蔽套环缝焊接机器人成套设备中,焊接机头是焊接动作的执行机构,可实现焊枪上下位移、焊枪角度调整、送丝等功能动作,主要结构由以下几个部分组成:焊枪、AVC滑块机构、送丝机构、电缆接口集成。焊枪为直式水冷自动TIG焊枪,焊枪采用循环水冷却,若水冷系统发生故障,设备具有报警功能。焊枪配有送丝支架,焊丝位置可通过送丝两坐标装置进行调整。AVC滑块是电弧电压自动控制功能的执行机构,在非焊接时可实现焊枪位置在焊缝高度方向的精细调整,焊接时保持焊接弧长一致。青海定子屏蔽套环缝焊接机器人设备宝利苏迪管板机器人焊接设备具有钨极自动更换系统,配合机器人完成钨极的自动更换动作。

宝利苏迪自动堆焊机器人系统,堆焊机头安装在焊接操作机上,立柱安装在设备底座上。根据工件配备水平伸缩机构。整体机构的刚性满足焊接机构精度。操作机为电动回转精密操作机,由回转部分,立柱,横梁,控制系统组成。操作机的机械结构设计合理,刚性和稳定性好,各部分功能能满足要求,设备的润滑系统设计完善,能够保证各传动部件的良好方便润滑。立柱回转启动力矩大,启动和停止迅捷,传动精度高,运动平稳,可配合机头实现焊枪初定位。横梁升降平稳,均匀,安全系数高,立柱内配置重平衡装置。堆焊操作机滑架上装有安全防坠自锁装置。
宝利苏迪POLYSOUDE自动堆焊机头安装于堆焊机器人端部法兰,由堆焊焊枪,送丝机构,焊枪水气接口板,线束等部分组成。焊枪电流容量大,并具有热丝功能。钨极与焊丝之间距离可调。堆焊母材:碳钢或合金钢。填充焊丝可为不锈钢焊丝或镍基合金焊丝,或低合金焊丝。焊丝直径:1.0mm,1.2mm。钨极尺寸:4.0mm。焊接机头上配有角度调节板,可在0-45度范围内将焊枪从横焊调整至斜向下45度,便于堆焊接管内台阶处的角焊缝。焊接机头具有送丝机构,包括送丝电机,焊丝盘支架,送丝导管,热丝导电杆,导丝嘴等。送丝机构的送丝嘴具有合适的角度,保证焊丝能够顺畅地送入熔池中,送丝顺畅有力,速度无极可调,动作精确。宝利苏迪窄间隙焊接机器人系统包括热丝TIG窄间隙焊枪,焊接电源,机器人,变位机,摄像监控系统等。

宝利苏迪POLYSOUDE悬吊管托块焊接机器人设备可根据具体产品焊缝要求,实现单层或多层多道热丝TIG焊。焊缝根部完全熔透。托块端部可实现包角焊接。焊缝表面经PT检验合格。焊接过程中可对焊接工艺参数(焊接电流,焊接电压,焊接速度,摆动速度,摆幅,送丝速度,热丝电流等)进行调整。焊枪轨迹设定界面要求简单方便、人机操作友好,能实现典型悬吊管托块结构图形关键参数设定的可视化。悬吊管夹持装置在旋转过程中可无级调速,无抖动现象。自动钨极更换装置可实现规定时间人为、控制更换钨极两种模式。宝利苏迪主管道机器人行走机构用于机器人的行走,保证机器人夹持焊枪的运动范围满足主管道接管嘴的可达性。西藏管板机器人设备生产厂家
宝利苏迪机器人控制台用于集中同步控制机器人系统,焊接电源,送丝机构,弧压跟踪等模块或系统。河北堆焊机器人TIG堆焊单元
宝利苏迪多机器人管板自动焊接设备智能协作系统保证多机头分工作业,互不干涉,可按照图纸要求及系统划分在划分区域内工作。多机头焊接速度、定位速度等保证相同,四个焊接机头同时工作时,考虑速度差导致的各机头路线变化,在不损失焊接效率的前提下,不造成机头间发生碰撞或设备停止。焊接轨迹的动态变化,智能协同系统可保证系统可知各机头及机器人的空间坐标,根据每台机器人的位置,在移动或焊接过程中提前判断下一个焊接位置是否产生相互干涉碰撞,如产生干涉引导机器人到不产生干涉的位置继续焊接工作。河北堆焊机器人TIG堆焊单元




