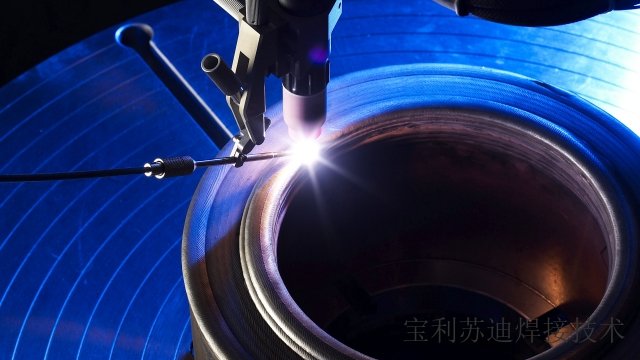
宝利苏迪耐腐蚀堆焊机器人采用工件回转的方式,以及双钨极热丝TIG焊的焊接工艺,堆焊管板大平面,管板其他区域。焊接位置1G和2G。堆焊材料:不锈钢或镍基合金。该套耐腐蚀堆焊机器人,具有完整软件包,与数字化焊机通讯良好,可控性好。机器人遥控盒使用界面人性化,方便焊接参数设置与调试。机器人运动范围和区域满足工件全部焊缝的焊接要求。机器人远程监控包括机器人主体和焊机状态监控。使用寿命可达15年。工作站的气路水路管道设计合理,机器人动作时不发生缠绕干涉。宝利苏迪长管纵缝堆焊设备,焊枪由钢丝绳导向,由机头行走机构推拉进出管子完成纵缝焊接。福建内孔堆焊设备制造商

AVC的工作原理是闭环电压调节。对于相同的焊接条件,一个给定的电压对应一个电弧高度。电压和电弧高度之间的对应关系要求钨极(作为测量仪器)保持完美状态。钨极被用作测量传感器,这意味着,如果钨极磨损,不仅电弧柱会被影响,而且会改变钨极与工件距离和参考电压之间的初始设定关系。有几种情况可能会导致电弧高度的变化:钨极磨削角度的变化;钨极污染;不正常的过热(冷却问题或尺寸不正确)。因此,观察可以揭示许多可能的AVC不稳定性。中国台湾耐腐蚀堆焊机头宝利苏迪可提供垂直堆焊设备,包括工件旋转或焊炬旋转垂直堆焊设备。
在焊接之外,AVC滑块用于焊枪定位或准备起弧。自动焊接的第一步是通过AVC滑动运动使电极接触工件。接触点是通过电极和工件之间的闭合回路来检测的。摆动滑块,在较少情况下用于焊接前的定位,只有当需要一个或两个参考边时才需要(例如,在凹槽中心定位或相对于参考面进行定位)。在焊接过程中,摆动滑块可能与焊接电流同步进行振荡运动,或使轨迹被重置或偏移(例如步进)。摆动功能需保证摆动的高精度和高稳定性,可以和焊接电流脉冲同步运动来保证厚壁情况下的侧壁熔合,支持对填充及盖面情况多种摆动模式控制。
TIG堆焊电源PC600-3控制系统包括微处理器、6轴控制模块,控制柜,各种控制接口,内置标准程序和操作系统,PC电脑接口和打印机接口等。通过控制面板和与焊接设备相连的PC电脑,整套焊接设备的控制系统能够对所有参数和动作进行编程控制、实时监控和编程范围内的超驰控制。界面显示设备:包括遥控器和PC,其中的显示系统包括电源上的电流电压表,控制柜电脑屏幕显示,遥控器上的液晶屏幕和PC屏幕,可以将焊接过程中的主要参数实时显示:焊接电流,电弧电压,程序标号,执行时间,焊枪位置等。宝利苏迪自动堆焊设备可用于汽轮机阀座部件的现场堆焊修复。

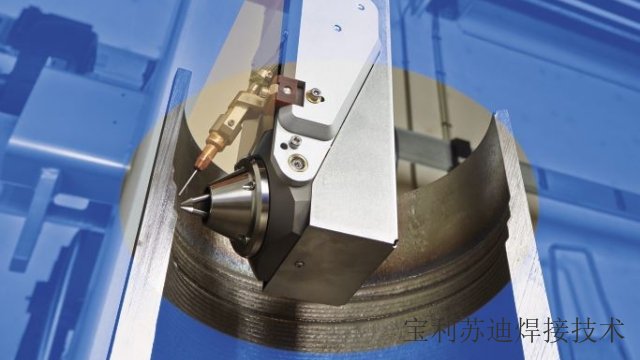
AVC滑块、OSC滑块具有特殊的重要性,因为它们直接干预焊接过程控制。AVC装置由动力滑块、测量系统和闭环调节系统组成。系统需要检测焊炬(靠近钨极处)的电弧电压,以限制线束长度产生的线路损耗影响。AVC的工作原理是基于电弧高度和产生的电压值之间的直接关系(特定电流值情况下)。在正常工作范围内(氩气保护下焊接,电流30A以上),AVC克服了所有的不规则性,确保电弧特性的恒定,从而增强了焊珠的规律性。各种相关功能有助于更精细地控制AVC滑块的反应,使其更具反应性,抑制其运动或延迟对焊缝池的影响。此外,AVC滑块的运动在焊接程序中进行编程,并与焊接电流同步。宝利苏迪接管内壁堆焊设备,焊接机头安装在操作机上,机头不动,变位机带动工件旋转完成堆焊。陕西堆焊设备生产厂家
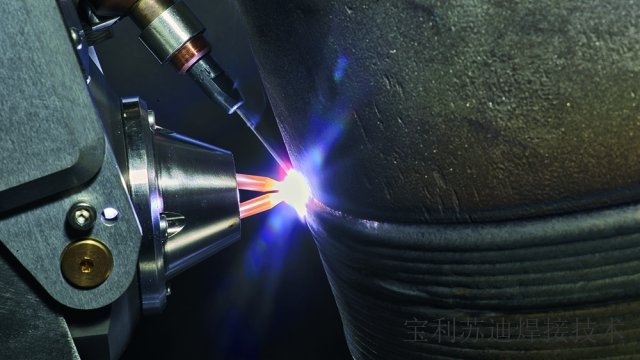
宝利苏迪堆焊设备送丝装置包括送丝电机,焊丝盘支架,送丝导管,热丝导电杆,导丝嘴等。福建内孔堆焊设备制造商
宝利苏迪自动氩弧堆焊设备可用于隔离层堆焊。这种应用中的堆焊是为了创造一个冶金过渡区,制造一个异构接头。一旦接头制成,隔离层在焊缝的机械强度中起着不可或缺的作用。本套隔离层端面堆焊设备,表面堆焊设备可用于压力容器接管隔离层堆焊,泵壳隔离层堆焊等。设备用于不锈钢和镍基合金材料的堆焊。设备由焊接及热丝电源,无限回转焊接机头,焊枪,摄像头,送丝调整机构,机头固定操作机及大行程十字滑块,控制系统,冷却系统等组成。福建内孔堆焊设备制造商