自动化智能机器人实验台与软件配合时可能会遇到兼容性、通信、数据处理等多方面的问题,以下是具体分析:兼容性问题系统兼容性:实验台的硬件驱动程序可能只支持特定版本的操作系统,而所使用的软件可能需要在其他系统环境下运行,就会出现不兼容的情况。例如,实验台的底层驱动基于Windows10开发,而...
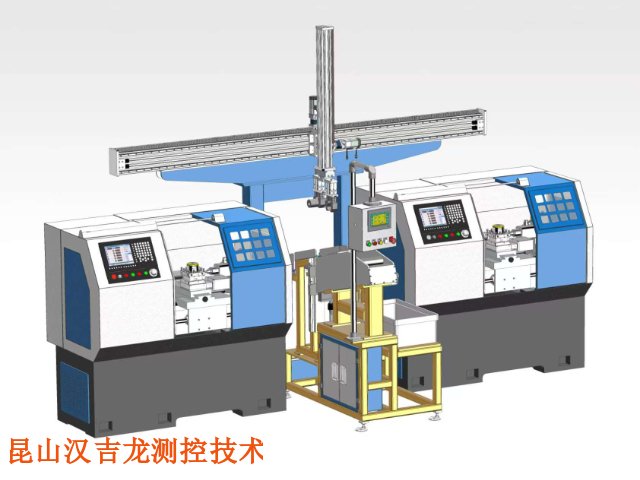
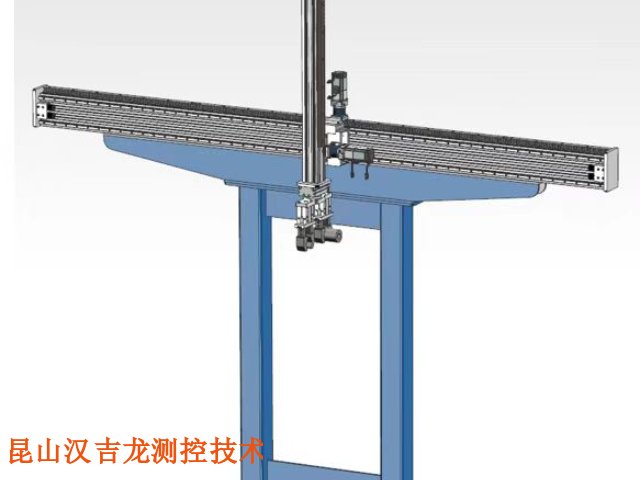
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
自动化智能机器人实验台的数据在机器人可靠性与安全性方面发挥着多方面的重要作用,具体如下:故障预测与诊断实时状态监测:实验台通过各种传感器实时收集机器人运行过程中的大量数据,涵盖温度、压力、电流、电压、振动等多个参数。例如,在工业机器人的关节部位安装温度传感器和振动传感器,持续监测关节在运行时的温度和振动情况。一旦某个关节的温度出现异常升高或振动幅度超出正常范围,这些数据会及时被实验台捕捉,为后续的故障判断提供依据。历史数据对比:实验台会存储机器人在正常运行状态下的各项数据作为基准。在机器人运行过程中,将实时数据与历史数据进行比对。若发现某些数据出现明显偏离,如电机的电流值在相同任务下比以往正常运行时高出许多,可能意味着电机存在过载或内部故障等问题。通过这种对比分析,能够在故障尚未明显表现出来之前就察觉到潜在异常。数据趋势分析:利用数据分析算法对采集到的数据进行趋势分析,不*能了解机器人当前的状态,还能预测未来可能出现的问题。以电池电量数据为例,通过分析电量消耗的趋势,如果发现电量消耗速度比正常情况快,可能预示着电池老化或存在漏电问题。通过建立数据模型。智能机器人实验台至关重要吗?气动系统自动化智能机器人实验台写论文

轨迹规划与优化方面模型预测操控算法(MPC):通过建立机器人的运动模型,预测机器人在未来一段时间内的运动轨迹,然后在每个操控周期内,基于预测结果和当前状态,优化计算出**优的操控输入序列,使机器人沿着**接近理想的轨迹运动,从而提高轨迹精度,减少运动偏差。基于样条曲线的轨迹规划算法:如采用B样条曲线等方法进行轨迹规划,可生成平滑、连续的运动轨迹,避免轨迹中的不连续点或突变,减少机器人在运动过程中的冲击和振动,保证机器人能够精确地按照预设轨迹运动,提高操作的平稳性和精度。增强系统鲁棒性方面滑模操控算法:在系统状态空间中定义一个滑动面,使系统在受到外部干扰或模型不确定性影响时,能迅速调整到滑动面上并保持在滑动面上运动,对系统的参数变化和外部干扰具有很强的鲁棒性,确保机器人在复杂的实验环境或存在干扰的情况下,仍能保持较高的操作精度。鲁棒操控算法:设计时充分考虑了系统模型的不确定性和可能存在的外部干扰,通过优化操控参数和结构,使系统在各种不确定因素下都能保持稳定的性能,保证机器人的运动精度不受影响,提高实验台在不同工况下的可靠性和准确性。 气动系统自动化智能机器人实验台写论文自动化智能机器人实验台能耗大吗?
多传感器融合与反馈方面基于视觉反馈的操控算法:利用视觉传感器获取机器人当前的位置、姿态以及周围环境信息,与目标状态进行对比,然后根据偏差调整机器人的运动。视觉反馈能提供丰富的环境信息,使机器人能够实时感知并避开障碍物,精确地对准目标,常用于需要高精度操作的实验场景。多传感器融合操控算法:将多种传感器(如视觉、力觉、惯性传感器等)的数据进行融合处理,综合利用各传感器的优势,为运动操控算法提供更***、准确的信息。例如,力觉传感器可用于精确操控机器人与物体的接触力,在进行装配、抓取等操作时,结合视觉和力觉反馈的操控算法能使机器人更精确地完成任务,提高操作的准确性和成功率。迭代学习操控算法的原理是什么?基于样条曲线的轨迹规划算法有哪些?除了文中提到的算法。
hojolo 结合分析目的故障诊断:要检测机器人是否存在故障及确定故障位置,可选择基于规则的诊断算法、故障树分析法,也可采用神经网络诊断算法、支持向量机等有监督学习算法,通过训练故障样本数据来实现准确诊断。性能评估:评估机器人的运动精度、性能等,可使用均方误差(MSE)、峰值信噪比(PSNR)、平均***误差(MAE)等算法来计算实际输出与预期输出的差异。预测任务:预测机器人的未来状态、故障趋势等,时间序列预测算法如ARIMA、LSTM比较合适。若要预测机器人在不同环境下的行为表现,可使用基于强化学习的预测算法。考虑计算资源与时间成本计算资源:如果实验台的硬件配置较低,计算能力有限,应选择复杂度较低、对计算资源需求小的算法,如简单的统计分析算法、基于规则的算法。若实验台具备强大的计算能力,有高性能的CPU、GPU集群等,那么可以考虑深度学习等计算复杂度高但性能强大的算法。时间要求:对于实时性要求高的任务,如机器人在实时运行过程中的故障检测和预警,需要选择计算速度快、响应及时的算法,像基于规则的迅速判断算法。对于非实时性的数据分析任务,如对机器人长期运行数据的性能评估和优化,可以选择一些计算时间较长但精度更高的算法。 实验台能承载机器人梦想吗?
自动化智能机器人实验台具有多方面的优势,主要体现在高度集成化、自主化、可扩展性等方面,以下是详细介绍:高度集成化多系统整合:将机械结构、系统、传感器系统、动力系统等多个关键部分集成于一体,为机器人的研发和测试提供了一个完整的平台,使研究人员能够方便地对各个系统进行协同调试和优化。空间紧凑:采用紧凑的设计理念,合理布局各个组件,在有限的空间内实现了丰富的功能,节省了实验场地,便于在不同的实验环境中灵活部署。高度自动化自动执行任务:能够按照预设的程序和指令自动完成各种实验任务,如机器人的自主导航、目标识别与抓取等,减少了人工操作的繁琐和误差,提高了实验效率和准确性。实时监控与反馈:配备了监控系统,可实时监测机器人的运行状态和各项参数,如电机转速、传感器数据等,并根据预设的条件自动进行反馈调整,确保实验过程的稳定性和可靠性。 自动化智能机器人实验台能兼容其他设备吗?气动系统自动化智能机器人实验台写论文
自动化智能机器人实验台的使用寿命有多久呢?气动系统自动化智能机器人实验台写论文
电气部分连接检查:定期检查实验台的电源插头、插座、电缆等连接部位是否牢固,有无破损、老化或松动现象。若发现问题,应及时更换或修复,以防止电气故障和安全。电气元件:观察电气元件,如电机、操控器、驱动器、传感器等是否有发热、异味、异响等异常现象。定期清洁电气操控柜内部,确保无灰尘、杂物,保持散热良好,检查散热风扇是否正常工作,通风口是否堵塞。电源系统:确保电源供应稳定,电压和电流在设备要求的范围内。使用电压表和电流表等工具定期检测电源参数,防止过载或短路现象的发生。操控系统软件更新:及时更新实验台的操控系统软件、驱动程序等,以获取更好的性能、稳定性和新功能,修复已知的漏洞和问题。同时,定期备份重要的软件程序和数据,以防丢失或损坏。参数校准:根据实验需求和设备运行情况,适时对实验台的操控参数进行调整和校准,如机器人的运动速度、加速度、位置精度等,确保设备能够准确地执行任务。系统检查:检查操控系统是否稳定,有无故障报警信息。定期对操控系统进行功能测试,确保各个模块和功能都能正常工作。 气动系统自动化智能机器人实验台写论文
与自动化智能机器人实验台相关的文章

气动系统自动化智能机器人实验台加工
- 上海自动化智能机器人实验台制造商 2025-03-01
- VALENIAN自动化智能机器人实验台调试 2025-02-27
- 智能化自动化智能机器人实验台系统 2025-02-27
- 智能化自动化智能机器人实验台定制 2025-02-26
- 非标型自动化智能机器人实验台公司 2025-02-25
- 维护自动化智能机器人实验台连接 2025-02-23
- 气动系统自动化智能机器人实验台写论文 2025-02-23
- VT-SJC1000自动化智能机器人实验台怎么样 2025-02-21
- 6轴自动化智能机器人实验台生产 2025-02-18
- 教学自动化智能机器人实验台电话 2025-02-18
- 江苏自动化智能机器人实验台电话 2025-02-13
- 设备自动化智能机器人实验台现状 2025-02-13
与自动化智能机器人实验台相关的产品


与自动化智能机器人实验台相关的新闻
-
气动系统自动化智能机器人实验台厂家 2025-02-09 09:07:00自动化智能机器人实验台智能感知与决策多种传感器融合:集成了多种类型的传感器,如视觉传感器、激光雷达、超声波传感器等,通过传感器融合技术,使机器人能够更***、准确地感知周围环境,为智能决策提供丰富的数据支持。智能算法应用:支持各种智能算法,如深度学习、强化学习等,使机器人能够根据感知到的环境...
-
高校自动化智能机器人实验台服务 2025-02-07 04:07:00轨迹规划与优化方面模型预测操控算法(MPC):通过建立机器人的运动模型,预测机器人在未来一段时间内的运动轨迹,然后在每个操控周期内,基于预测结果和当前状态,优化计算出**优的操控输入序列,使机器人沿着**接近理想的轨迹运动,从而提高轨迹精度,减少运动偏差。基于样条曲线的轨迹规划算法:如采...
-
上海自动化智能机器人实验台怎么用 2025-02-07 03:06:59自动化智能机器人实验台具有多方面的优势,主要体现在高度集成化、自主化、可扩展性等方面,以下是详细介绍:高度集成化多系统整合:将机械结构、系统、传感器系统、动力系统等多个关键部分集成于一体,为机器人的研发和测试提供了一个完整的平台,使研究人员能够方便地对各个系统进行协同调试和优化。空间紧凑...
-
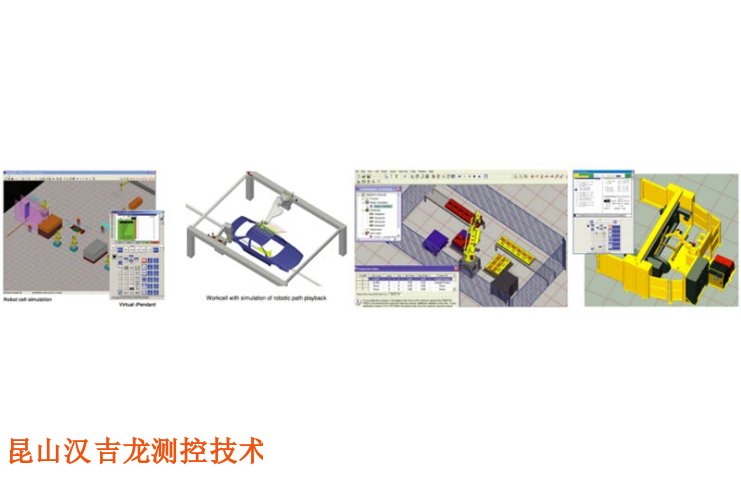
共享自动化智能机器人实验台保修 2025-02-07 06:07:35VALENIAN自动化智能机器人实验台技术研发:研究人员可以在实验台上对机器人的运动算法、路径规划算法、传感器融合算法、人工智能算法等进行开发和调试,不断优化和改进机器人的性能和智能水平。性能测试:通过在实验台上设置各种不同的工况和环境条件,对机器人的运动精度、速度、负载能力、传感器精度...
与自动化智能机器人实验台相关的问题
与自动化智能机器人实验台相关的标签
新闻资讯
产品推荐
-

新一代泵轴热补偿对中仪连接
2026-06-15 -
10米联轴器振动红外对中仪使用方法
2026-06-15 -
马达无线激光对中仪使用视频
2026-06-15 -

爱司泵轴热补偿对中仪电话
2026-06-15 -

电机联轴器振动红外对中仪怎么样
2026-06-15 -

瑞典轴对中激光仪批发
2026-06-15 -

三合一无线激光对中仪用途
2026-06-15 -
爱司联轴器不对中测量仪的作用
2026-06-15 -

租用设备安装对心校准仪使用方法图解
2026-06-15