自动化智能机器人实验台与软件配合时可能会遇到兼容性、通信、数据处理等多方面的问题,以下是具体分析:兼容性问题系统兼容性:实验台的硬件驱动程序可能只支持特定版本的操作系统,而所使用的软件可能需要在其他系统环境下运行,就会出现不兼容的情况。例如,实验台的底层驱动基于Windows10开发,而...
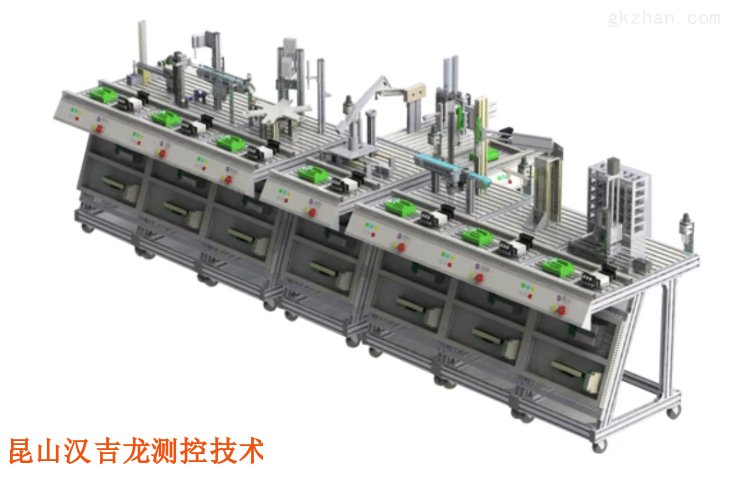
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
汉吉龙测控有限公司自动化智能机器人实验台实验和测试成本实验设备和场地:需要搭建专门的实验场地,配备各种测试设备,如力学测试设备、电气性能测试设备、环境模拟设备等,这些设备的购置和场地租赁费用较高。测试耗材和样品:在测试过程中,需要消耗大量的耗材和样品,如传感器的校准试剂、机械部件的磨损测试样品等,增加了实验成本。第三方检测和认证:如果需要对实验台进行第三方检测和认证,以满足相关标准和规范,也需要支付一定的费用。其他成本**和知识产权费用:为了使用某些避免侵权,可能需要支付**许可费用。同时,自身研发成果的**申请和保护也需要费用。项目管理和协调成本:由于涉及多个环节和团队,需要项目管理和协调,这也会产生相应的成本。 实验台助力机器人技术走向成熟。ABB自动化智能机器人实验台贴牌

网络与通信加强网络连接:采用高速、稳定的网络通信技术,如5G、Wi-Fi6等,确保实验台与外部设备、云端服务器之间的数据传输迅速、可靠,支持机器人的远程操控和监控。对网络设备进行优化配置,如增加网络带宽、调整网络参数等,提高网络的稳定性和抗干扰能力,减少数据传输延迟和丢包率。优化通信协议:选择合适的通信协议,如TCP/IP、UDP、MQTT等,根据实验台的具体应用场景和数据传输需求,对通信协议进行优化配置,提高数据传输的效率和准确性。系统集成与协同多设备协同优化:如果实验台涉及多个机器人或多种设备的协同工作,对它们之间的协同机制进行优化设计,确保各个设备之间能够配合,完成复杂的任务。通过建立统一的系统架构和操控平台,对实验台的各个子系统进行集成管理,实现资源的合理分配和协同工作,提高整体性能。模拟:利用模拟和技术,在虚拟环境中对实验台的性能进行评估和优化,提前发现潜在问题,减少实际实验中的调试时间和成本。通过模拟不同的实验场景和工作条件,对实验台的设计和参数进行优化调整,使其在实际应用中能够更好地发挥性能。 分炼自动化智能机器人实验台公司自动化智能机器人实验台优势在哪呢?
选择适合教学的自动化智能机器人实验台,需要从教学需求、技术参数、安全性能等多个方面进行综合考虑,以下是具体要点:契合教学目标基础教学:若用于基础课程教学,如机械、电子、编程基础等,可选择结构简单、易于理解的实验台,像具有基本机械结构和简单操控功能的轮式移动机器人实验台,能让学生直观了解机器人的基本组成和运动操控原理。教学:针对机器人学、自动化操控等课程,则需功能更强大、精度更高的实验台,如六自由度工业机器人实验台,可满足学生对机器人运动学、动力学、复杂操控算法等深入学习和实践的需求2。创新实践:用于学科竞赛、科研项目等创新实践的话,要选择开放性和扩展性好的实验台,方便学生进行二次开发和功能扩展,如一些可搭载多种传感器和执行器的开源机器人实验台,能激发学生的创新思维和实践能力。
配合方式通信协议:实验台与软件之间通过特定的通信协议进行数据传输和指令交互,如TCP/IP协议、串口通信协议等。例如,通过串口通信协议,实验台可以将传感器数据发送给数据分析软件,同时接收来自编程软件的指令。应用程序接口(API):实验台通常会提供相应的API,方便软件开发者将实验台与各种软件进行集成。开发者可以调用这些API来实现对实验台的和数据采集,如通过ROS的API可以方便地实现不同软件模块与实验台的交互。中间件:一些情况下会使用中间件来实现实验台与不同软件的连接和协同工作。中间件可以对不同软件和实验台之间的通信和数据格式进行转换和适配,使它们能够更好地配合,如在工业自动化领域,OPCUA中间件常被用于连接机器人实验台与各种工业软件。自动化实验台能创造可能吗?

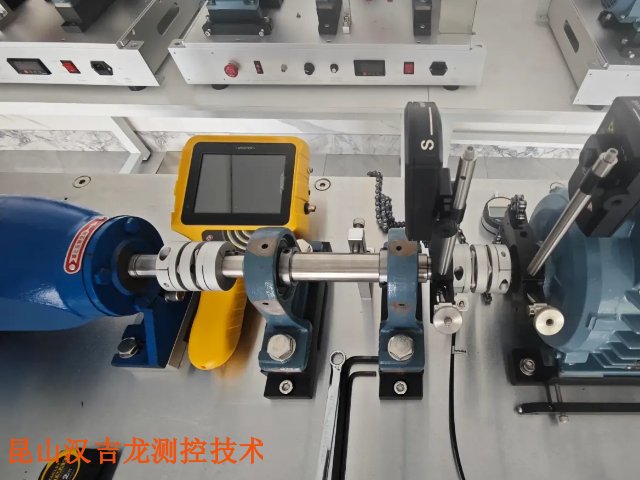
瓦伦尼安教学设备有限公司自动化智能机器人实验台传感器相关实验传感器性能测试实验:对机器人搭载的各类传感器,如摄像头、激光雷达、力传感器等进行性能测试,包括测量传感器的精度、分辨率、响应时间、测量范围等指标,评估传感器是否满足机器人的应用需求。传感器融合实验:将多种传感器的数据进行融合处理,如将视觉传感器和激光雷达的数据融合,利用不同传感器的优势,提高机器人对环境的感知能力和信息获取的准确性,用于机器人的自主导航系统、目标识别等任务。环境感知实验:利用传感器让机器人感知周围环境的信息,如障碍物检测、地形识别、目标物体等,研究机器人在不同环境下的感知策略和算法,使机器人能够适应复杂多变的环境。 自动化智能机器人实验台好用吗?分炼自动化智能机器人实验台公司
实验台能推动机器人技术突破吗?ABB自动化智能机器人实验台贴牌
多传感器融合与反馈方面基于视觉反馈的操控算法:利用视觉传感器获取机器人当前的位置、姿态以及周围环境信息,与目标状态进行对比,然后根据偏差调整机器人的运动。视觉反馈能提供丰富的环境信息,使机器人能够实时感知并避开障碍物,精确地对准目标,常用于需要高精度操作的实验场景。多传感器融合操控算法:将多种传感器(如视觉、力觉、惯性传感器等)的数据进行融合处理,综合利用各传感器的优势,为运动操控算法提供更***、准确的信息。例如,力觉传感器可用于精确操控机器人与物体的接触力,在进行装配、抓取等操作时,结合视觉和力觉反馈的操控算法能使机器人更精确地完成任务,提高操作的准确性和成功率。迭代学习操控算法的原理是什么?基于样条曲线的轨迹规划算法有哪些?除了文中提到的算法。ABB自动化智能机器人实验台贴牌
与自动化智能机器人实验台相关的文章

气动系统自动化智能机器人实验台加工
- 上海自动化智能机器人实验台制造商 2025-03-01
- VALENIAN自动化智能机器人实验台调试 2025-02-27
- 智能化自动化智能机器人实验台系统 2025-02-27
- 智能化自动化智能机器人实验台定制 2025-02-26
- 非标型自动化智能机器人实验台公司 2025-02-25
- 维护自动化智能机器人实验台连接 2025-02-23
- 气动系统自动化智能机器人实验台写论文 2025-02-23
- VT-SJC1000自动化智能机器人实验台怎么样 2025-02-21
- 6轴自动化智能机器人实验台生产 2025-02-18
- 教学自动化智能机器人实验台电话 2025-02-18
- 江苏自动化智能机器人实验台电话 2025-02-13
- 设备自动化智能机器人实验台现状 2025-02-13
与自动化智能机器人实验台相关的产品


与自动化智能机器人实验台相关的新闻
-
气动系统自动化智能机器人实验台厂家 2025-02-09 09:07:00自动化智能机器人实验台智能感知与决策多种传感器融合:集成了多种类型的传感器,如视觉传感器、激光雷达、超声波传感器等,通过传感器融合技术,使机器人能够更***、准确地感知周围环境,为智能决策提供丰富的数据支持。智能算法应用:支持各种智能算法,如深度学习、强化学习等,使机器人能够根据感知到的环境...
-
高校自动化智能机器人实验台服务 2025-02-07 04:07:00轨迹规划与优化方面模型预测操控算法(MPC):通过建立机器人的运动模型,预测机器人在未来一段时间内的运动轨迹,然后在每个操控周期内,基于预测结果和当前状态,优化计算出**优的操控输入序列,使机器人沿着**接近理想的轨迹运动,从而提高轨迹精度,减少运动偏差。基于样条曲线的轨迹规划算法:如采...
-
上海自动化智能机器人实验台怎么用 2025-02-07 03:06:59自动化智能机器人实验台具有多方面的优势,主要体现在高度集成化、自主化、可扩展性等方面,以下是详细介绍:高度集成化多系统整合:将机械结构、系统、传感器系统、动力系统等多个关键部分集成于一体,为机器人的研发和测试提供了一个完整的平台,使研究人员能够方便地对各个系统进行协同调试和优化。空间紧凑...
-
共享自动化智能机器人实验台保修 2025-02-07 06:07:35VALENIAN自动化智能机器人实验台技术研发:研究人员可以在实验台上对机器人的运动算法、路径规划算法、传感器融合算法、人工智能算法等进行开发和调试,不断优化和改进机器人的性能和智能水平。性能测试:通过在实验台上设置各种不同的工况和环境条件,对机器人的运动精度、速度、负载能力、传感器精度...
与自动化智能机器人实验台相关的问题
与自动化智能机器人实验台相关的标签
新闻资讯
产品推荐
-

AS500无线激光对中仪校准规范
2026-06-16 -

爱司轴对中激光仪企业
2026-06-16 -
新一代快速对中校正仪企业
2026-06-15 -
新一代泵轴热补偿对中仪连接
2026-06-15 -
10米联轴器振动红外对中仪使用方法
2026-06-15 -
马达无线激光对中仪使用视频
2026-06-15 -

爱司泵轴热补偿对中仪电话
2026-06-15 -

电机联轴器振动红外对中仪怎么样
2026-06-15 -

瑞典轴对中激光仪批发
2026-06-15