当前,该公司自主研发的无人艇平台系列产品和技术已在安防、船舶、教育等领域得到广泛应用。其中,多款功能部件填补了国内无人技术领域空白。创新资源助力***布局无人技术前沿领域据了解,公司目前已顺利完成天使轮融资,今年计划实现营业额达一千万元。接下来,公司将继续引入技术人才,扩大团队规模,同时围绕功能领域进行研发,加快布局无人机、无人车等无人技术前沿领域。如今,走进小豚智能的办公新址,办公区域整洁宽阔,墙上挂满了许许多多的奖杯和**证书,展示厅摆放的全自主无人艇和安防系列产品引人注目。小豚无人船喷水推进器喷管方向可变,便于船舶操纵.水文测量无人船艇技术参数
2020年,团队成立产业公司东莞小豚智能技术有限公司,获得松山湖创新创业大赛(华为专场)总决赛特等奖,研发的消费级产品获“东莞杯”金奖,成立一年通过高企认证,已获青橙资本、东莞科创金融千万级天使轮投资,其无人船相关产品和技术已在教育、环保、船舶、测绘、应急等领域得到广泛应用。工研院作为东莞市在松山湖建设的首批重大科研机构,探索形成“体制机制新型化,团队建设专职化、技术服务规模化、产业孵化链条化”等做法。2012年被《人民日报》、《焦点访谈》专访介绍了工研院在体制机制等方面探索及成效,被誉为全国新型科研机构的典型。针对制约区域制造业发展的关键技术问题,工研院在运动控制、智能感知、无人自主技术、工业大数据、3C产业智能制造装备及大功率激光器等研发领域取得突破,相关成果获国家技术发明二等奖(东莞建市以来较早)、广东省科技进步特等奖等。此外,先后发起和参与了如全国智能制造示范、国家首批先进制造业集群建设等一系列国家重大工程,**东莞在国家层面发出声音大型无人船艇加装公司致力于研发无人系统共性技术。

喷水推进器早在19世纪末就应用于船舶推进。在喷水推进器技术诞生340年的历程中,大致经历了液泵式喷水推进、间歇式喷水推进、底板式喷水推进、尾板式喷水推进和舷外喷水推进5个阶段。**初由于理论不成熟,工艺水平低下,喷水推进的效率很低,不能满足人们的需求,因此,在很长一段时期内,螺旋桨一直占主导地位。随着技术方面的不断进步,喷水推进器已广泛应用于各类船舶中。喷水推进器是用水泵作动力,将水从船底孔吸入,经舷部管子,把水从船后方向排出,靠水的反作用力来推进船舶。可实现船舶转向操作、正车/倒车操作、操控反应速度提升。喷水推进器简称喷泵,是一套完整的推进模式成套设备,简化了造船厂的安装程序,可轻而易举的固定在厂家提供的配套吸水/过渡管道上。这套管道设备可焊接或浇注在船体上。船厂无需另外装备任何复杂的吸水管道,只要安装一套动力传动系统和完成控制系统界面即可
推进器的驱动方式一般有电机驱动和液压驱动,小型推进器大多采用电动推进器,大功率、作业型推进器通常采用液压驱动。推进器控制系统的发展趋势为:更深会向深海发展;更远向远程发展;功能更强大向作业型及智能化方向发展。当今,自动化智能推进器控制系统已经在各各业中得到了广阔的应用和发展,在现代过程控制中,直流调速控制系统因为能够在范围内实现平滑调速,并且具有良好的起、制动性能而起着重要控制作用,特别是在需要高性能且可控的电力拖动领域中得到了广阔的应用。设计中研究的推进器控制系统主要是针对直流调速系统的控制问题小豚无人船喷水推进器在船舶上广阔采用。
近年来,随着自动控制、物联网、大数据等技术的快速发展,与船舶有关的环境感知技术、通信导航技术等也得到广阔的应用,为无人船开发提供了广阔的技术可行性。如今,无人船以无人化、集成化、自动化与智能化的信息获取方式,一方面为相关职能部门提供水下地形地貌测量、大坝安全监测等多项应用服务功能。另一方面,可为相关部门科学决策提供详尽、准确的基础资料。眼下,国内无人船的主要用途与应用领域包括:高精度水下地形测绘、大坝堤防安全检测、水文信息自动化监测、水环境自动监测、灾害应急服务。从用途举例的话,无人船可实现水质在线分布的测绘,通过这些数据比较和分析,可看出污染扩散的情况,并把污染源追踪出来,配合探测设备,找出水底的“暗管”,查出污染企业。而从应用领域举例的话,在传统水文测量和水环境监测中,多是依靠燃油船进行,船体较大,复杂水域有些不能前往。有些河道较窄水流较急,人也到不了,作业起来比较危险。无人船就能大显身手了。传统方式是在较污浊的水里取一点水样,拿回实验室分析。这种取样必须是人能去到的地方,不一定具备代表性。而无人智能船是选择几个关键点,在走航的过程中取回整条河的参数,是一个实时的过程减少了震动噪音,实现航行器静默航行,可作为水面无人船、水下机器人、潜水助推器等产品的推进装置。上海无人船艇控制部件无人船艇技术参数
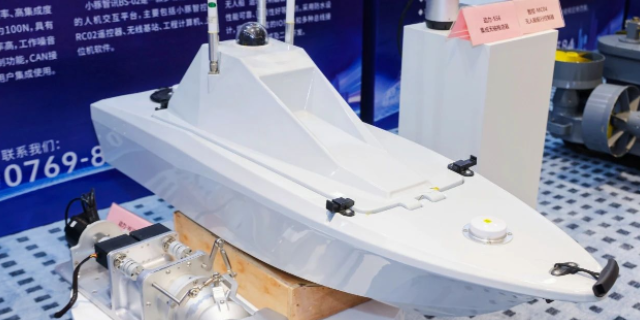
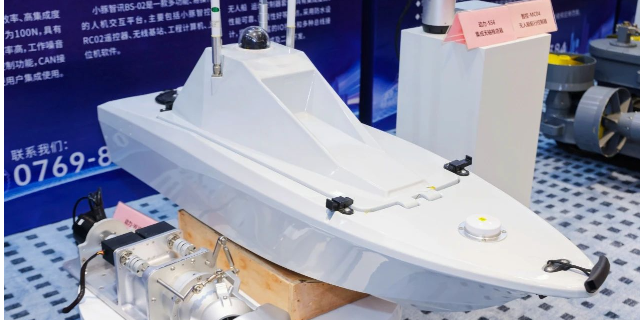
公司自研警戒巡逻无人艇。水文测量无人船艇技术参数
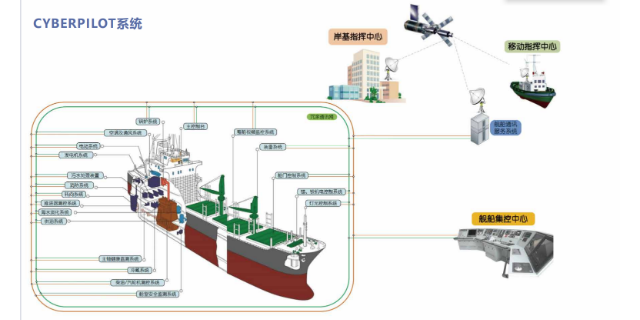
其中,平台系统各分系统定义如下:1、平台本体分系统:包括船体设计与布置、材料与结构以及平台机械,是无人船较基本的组成部分,为整个系统提供浮力、布置空间、执行机构以及必要的防护条件;2、动/能分系统:包括推进系统和电源供给系统,为无人船提供必要的水面机动能力,并为控制系统和任务载荷系统等提供电力支持;3、感知分系统:包括定位导航系统、外部环境感知系统和平台状态感知系统,为无人船运动决策与控制、自身状态监测提供必要的数据源及硬件、接口支持;4、控制分系统:包括控制系统硬件和软件,是无人船的“大脑”,通过全船的感知及控制设备,为无人船处理、分析外部空间及内部环境信息,并根据控制算法实现自主航行、自主避障等功能水文测量无人船艇技术参数