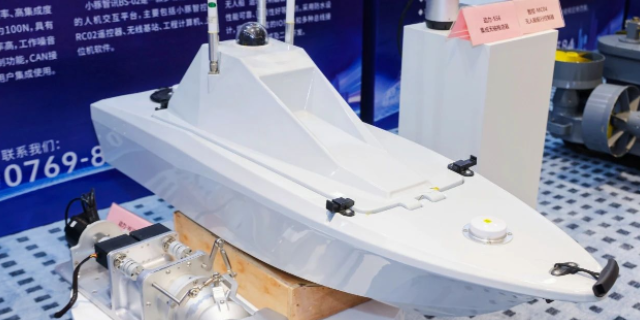
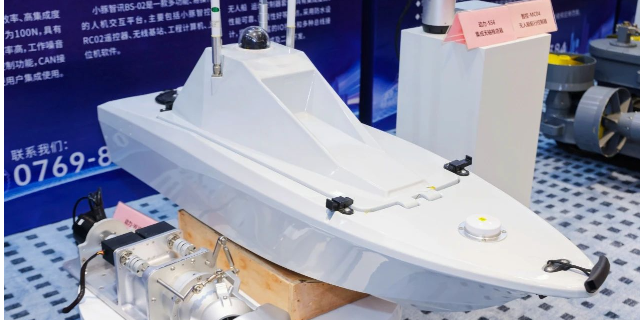
多工况适应性是喷水推进器的**竞争力之一。小豚智能通过大量水池试验和实际海域测试,积累了丰富的工况数据,使喷水推进器能适应不同水流条件。在湍急的河流环境中,推进器可自动增加输出功率对抗水流阻力;在平静的湖泊中则切换至节能模式减少能耗。针对不同水域的盐度差异,推进器的防腐系统会自动调整工作状态,在淡水和海水环境中均能保持稳定性能。这种多工况适应能力使搭载该推进器的无人船无需进行复杂改装,就能在河流、湖泊、海洋等不同类型水域间灵活切换作业,极大提升了设备的使用效率和经济性。东莞小豚智能技术有限公司研发的喷水推进器,动力强劲,能为无人船提供高效稳定的前行推力。广东安装喷水推进器用途

喷水推进器的能源管理系统实现了能效比较大化。该系统根据无人船的作业任务自动规划能源使用策略,在巡航阶段采用经济航速模式,喷水推进器保持低功率运行;当执行快速机动任务时,则自动提升功率输出。能源回收技术的应用使减速过程中产生的能量得以回收利用,进一步提升了能源利用效率。在长时间作业测试中,搭载该系统的无人船续航时间较传统控制方式延长了明显比例。能源管理技术的突破使无人船能在能源有限的情况下完成更复杂的作业任务,尤其适合需要远离基地的海洋调查等应用场景。吉林集成喷水推进器搭载喷水推进器的无人船,在航道测量工作中能快速准确地移动至测量点。

振动控制技术对喷水推进器的稳定运行至关重要。小豚智能的研发团队通过动力学分析找出推进系统的振动源,在电机与泵体之间设置了弹性减震装置,有效阻隔振动传递。叶轮设计采用了动平衡优化,减少旋转过程中产生的离心力振动。在振动测试中,搭载该推进器的无人船甲板振动幅度较传统设计降低了明显比例,这不*改善了船上精密仪器的工作环境,还减少了振动噪音对水生生物的影响。振动控制技术的应用使喷水推进器能更好地配合声学探测设备工作,在海洋测绘、水下考古等对振动敏感的场景中表现优异。
喷水推进器的工作基于牛顿第三运动定律,即相互作用的两个物体之间的作用力和反作用力总是大小相等,方向相反,作用在同一条直线上。其运作过程并不复杂,水泵作为主要部件,先将水从船底的吸口吸入。这些被吸入的水在经过一系列管道后,通过船后的喷口高速喷出。在水被喷出的瞬间,根据上述定律,船体会受到一个与水流喷射方向相反的反作用力,而这个力便是推动船舶前进的推力。简单来说,就如同人在光滑地面上向后扔出一个物体,人会因反作用力向前移动一样。喷水推进器通过精确控制水流的吸入与喷出,为船舶提供稳定且持续的推进动力,让船舶能够在水面上顺利航行,其推力的大小与水流的喷射速度、流量等因素紧密相关。喷水推进器的多传感器融合技术可实时监测水流状态,动态调整推进功率。

在智能航运时代,喷水推进器与智能航运系统的深度集成正重塑船舶的运行模式。通过与船舶自动化管理系统(AMS)、全球定位系统(GPS)、数字孪生技术的结合,喷水推进器能够实时感知船舶航行状态、海况变化与航道信息。例如,当智能航运系统检测到前方存在拥堵或恶劣天气时,可自动调整喷水推进器的输出功率与喷射角度,规划理想航行路径,实现避障与节能航行的双重目标。同时,基于物联网的传感器网络,可对喷水推进器的关键部件如叶轮、泵体的温度、振动等数据进行实时采集,通过边缘计算设备快速分析并反馈至控制系统,实现故障预警与智能维护。此外,在港口智能调度场景中,搭载喷水推进器的船舶能精细响应岸基指令,自动完成靠泊与离港操作,极大提升港口作业效率。喷水推进器与智能航运系统的融合,不*推动了船舶智能化升级,更为构建安全、高效、绿色的未来航运生态奠定了坚实基础。喷水推进器的静音设计,让无人船在夜间巡逻时不易被察觉。河北全自主喷水推进器操作
其高效的排水系统保证了喷水推进器的持续稳定工作。广东安装喷水推进器用途
在极地、深海等极端环境中,喷水推进器展现出独特的适应性。传统螺旋桨在低温高盐度的极地海域,容易因结冰或腐蚀影响性能,而喷水推进器的封闭式结构,能有效隔绝外界恶劣环境对主要部件的侵蚀。在深海探测作业中,装备喷水推进器的无人潜航器可灵活调整姿态,精细定位目标区域。其产生的微小水流扰动,不会惊扰海洋生物,有助于科研人员进行无干扰观测。在北极航道开通后,部分破冰船也开始采用喷水推进技术,利用其强劲的喷射力,在破碎冰层时提供额外推力,同时避免螺旋桨被冰块卡住的风险,为极端环境下的水上作业开辟了新路径。广东安装喷水推进器用途