企业商机
首页 > 企业商机
首页 > 企业商机
文具产品生产具有批量大、品类多的特点,传统人工外观检测效率低、易疲劳,难以满足现代化大规模生产需求。熙岳智能针对文具行业开发的视觉检测方案,通过智能化检测流程提升批量生产效率。该方案采用高速线阵相机与...
熙岳智能开发的视觉检测云平台,基于云计算与物联网技术,为企业提供便捷的远程监控质检数据服务。企业只需将视觉检测设备接入互联网,即可通过 Web 端或移动端 APP 实时查看生产线质检数据。平台支持多设...
皮革制品的质量和价值与其表面瑕疵状况密切相关,对皮革表面瑕疵进行准确检测和分级管理,是皮革加工企业提升产品附加值的重要手段。熙岳智能研发的视觉检测设备,凭借先进的技术,实现了皮革表面瑕疵的智能化分级管...
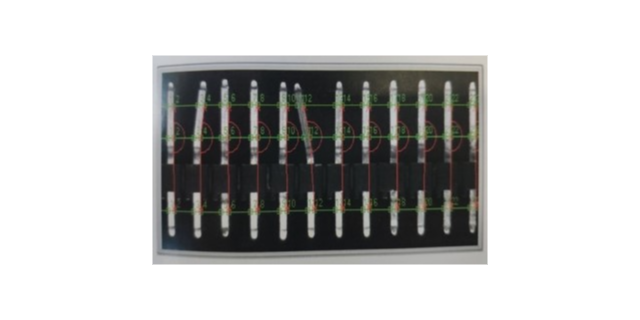
电子元器件生产具有高精度、高速度、高集成度的特点,生产线上的产品检测必须争分夺秒且准确无误。熙岳智能针对电子行业的特殊需求,精心研发制造了的视觉检测设备。该设备搭载了超高速数据处理芯片和优化的图像处理...

塑料制品在注塑成型过程中,易出现飞边、气泡、缩水、熔接痕等多种缺陷,及时发现并解决问题是保证生产效率与产品质量的关键。熙岳智能的视觉检测设备采用高速图像采集与 AI 缺陷识别技术,可对注塑机生产线上的...
工业生产环境往往复杂多变,高温、潮湿、粉尘、电磁干扰等因素都会对视觉检测设备的正常运行造成影响。熙岳智能充分考虑到工业生产环境的特殊性,在视觉检测设备的设计上采用工业级防护设计,使其能够适应各种复杂生...
在现代工业生产中,企业的生产线往往由多种不同品牌、不同类型的设备组成,各设备之间的通信协议差异较大,这给视觉检测平台的接入带来了困难。熙岳智能充分考虑到这一实际情况,研发的视觉检测平台具备强大的兼容性...
玻璃制品具有透光性强、表面光滑的特性,传统检测方法易对玻璃表面造成损伤,而熙岳智能研发的视觉检测技术实现了玻璃表面划痕的无损检测。该技术采用结构光投影与偏振成像相结合的原理,通过向玻璃表面投射特制的正...
玩具作为儿童日常接触的重要用品,其质量安全直接关系到儿童的健康成长。熙岳智能高度重视玩具产品的质量检测,运用先进的视觉检测技术,为儿童用品安全提供了有力保障。在玩具生产过程中,从塑料玩具的表面飞边、毛...

化妆品作为注重外观形象的消费品,其包装外观直接影响消费者的购买决策。熙岳智能针对化妆品包装的特点和品质要求,研发了专业的视觉检测系统,为保障产品形象提供了有力支持。该系统采用高分辨率彩色相机和均匀无影...
玻璃制品具有透光性强、表面光滑的特性,传统检测方法易对玻璃表面造成损伤,而熙岳智能研发的视觉检测技术实现了玻璃表面划痕的无损检测。该技术采用结构光投影与偏振成像相结合的原理,通过向玻璃表面投射特制的正...

玻璃制品具有透光性强、表面光滑的特性,传统检测方法易对玻璃表面造成损伤,而熙岳智能研发的视觉检测技术实现了玻璃表面划痕的无损检测。该技术采用结构光投影与偏振成像相结合的原理,通过向玻璃表面投射特制的正...

随着全球制造业一体化进程加速,企业对视觉检测设备的多语言操作需求日益增长。熙岳智能敏锐捕捉市场趋势,在视觉检测系统中集成多语言操作界面,覆盖英语、中文、日语、韩语、西班牙语等 12 种主流语言。系统采...
灯具产品的外观与装配质量直接影响消费者的使用体验和安全,熙岳智能的视觉检测系统为灯具企业质量管控提供了解决方案。在外观检测环节,系统采用多光谱成像技术,可检测灯具外壳的色差、划痕、喷涂不均匀等问题,对...

体育用品的表面质量不影响美观,更关系到运动员的使用安全与竞技表现,熙岳智能的视觉检测方案为体育用品品质把控提供专业支持。针对运动鞋、羽毛球拍、健身器材等不同品类,方案采用定制化检测策略。在运动鞋检测中...
为满足制造业连续化生产需求,熙岳智能视觉检测设备在设计时充分考虑高负荷运行的稳定性,支持 7×24 小时不间断工作。设备采用智能散热系统,通过液冷与风冷相结合的方式,确保部件在长时间运行中温度保持在合...
在汽车工业领域,零部件的质量直接关乎整车的安全性与可靠性,任何细微缺陷都可能引发严重后果。熙岳智能凭借深厚的技术积累和持续的研发投入,自主研发出一套功能强大且高度智能化的视觉检测系统。该系统采用先进的...
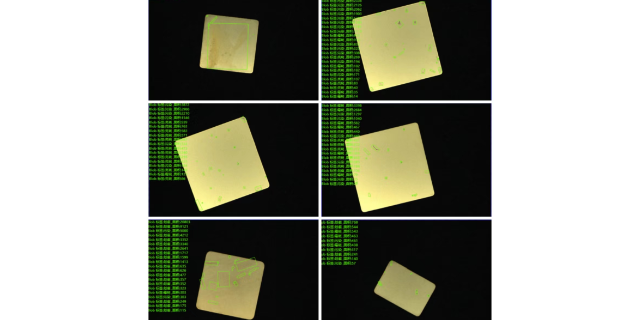
半导体行业对产品检测精度要求极高,尤其是在芯片封装环节,任何微小的误差都可能导致芯片失效。熙岳智能凭借在视觉检测领域的专业技术和丰富经验,为半导体行业定制研发了的视觉检测设备。该设备采用了超精密的光学...
塑料制品在注塑成型过程中,易出现飞边、气泡、缩水、熔接痕等多种缺陷,及时发现并解决问题是保证生产效率与产品质量的关键。熙岳智能的视觉检测设备采用高速图像采集与 AI 缺陷识别技术,可对注塑机生产线上的...
化妆品作为注重外观形象的消费品,其包装外观直接影响消费者的购买决策。熙岳智能针对化妆品包装的特点和品质要求,研发了专业的视觉检测系统,为保障产品形象提供了有力支持。该系统采用高分辨率彩色相机和均匀无影...
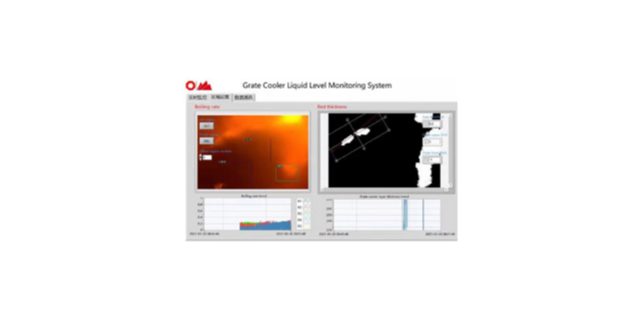
在现代工业生产中,许多场景下产品处于高速运动或生产环境动态变化的状态,这对视觉检测算法的稳定性和准确性提出了极高要求。熙岳智能凭借深厚的技术研发实力,针对动态环境下的检测难题,研发出具有性能的视觉检测...
体育用品的表面质量不影响美观,更关系到运动员的使用安全与竞技表现,熙岳智能的视觉检测方案为体育用品品质把控提供专业支持。针对运动鞋、羽毛球拍、健身器材等不同品类,方案采用定制化检测策略。在运动鞋检测中...
卫浴产品的外观与功能质量直接影响用户的使用体验,熙岳智能为卫浴行业定制的视觉检测方案有效提升产品出厂合格率。在陶瓷马桶检测中,方案采用三维激光扫描与超声探伤结合的技术,检测马桶的釉面平整度、内部空洞缺...
医药行业对产品质量和安全性有着极高的要求,每一个生产环节都必须严格把控。熙岳智能充分考虑到医药行业的高精密检测需求,精心设计并推出了的视觉检测方案,为医药生产提供全流程质量管控。在药品的原材料检测阶段...
文具产品生产具有批量大、品类多的特点,传统人工外观检测效率低、易疲劳,难以满足现代化大规模生产需求。熙岳智能针对文具行业开发的视觉检测方案,通过智能化检测流程提升批量生产效率。该方案采用高速线阵相机与...
建材行业的板材生产规模大、产品规格多样,传统的人工板材表面检测存在效率低、漏检率高的问题。熙岳智能针对建材行业板材表面检测的需求,研发出先进的视觉检测技术,实现了自动化全覆盖检测。该技术采用多组工业相...
塑料制品在注塑成型过程中,易出现飞边、气泡、缩水、熔接痕等多种缺陷,及时发现并解决问题是保证生产效率与产品质量的关键。熙岳智能的视觉检测设备采用高速图像采集与 AI 缺陷识别技术,可对注塑机生产线上的...
熙岳智能将机器视觉技术与物联网技术深度融合,开创了智能质检的全新生态模式。在智能质检新生态中,机器视觉技术作为检测手段,通过高精度的图像采集和先进的算法分析,实现对产品质量的检测;物联网技术则搭建起数...
食品安全一直是社会关注的焦点,食品包装的密封性则是保障食品安全的重要环节。熙岳智能深刻认识到食品包装检测的重要性与特殊性,致力于通过先进的视觉检测技术提升食品包装质量。其视觉检测技术基于强大的 AI ...
在家居饰品市场,消费者对产品外观的要求日益严苛,产品外观质量直接影响其市场竞争力。从精致的陶瓷摆件到时尚的金属相框,从柔软的布艺饰品到精美的玻璃工艺品,每一件家居饰品都需要具备无可挑剔的外观才能赢得消...
2026.06.25 广东康耐视视觉检测系统
2026.06.25 江苏视觉检测仪
2026.06.25 湖南缺陷视觉检测
2026.06.25 3D视觉检测咨询
2026.06.24 安徽视觉检测原理
2026.06.24 湖北视觉检测镜头
2026.06.24 安徽自动化视觉检测设备
2026.06.24 湖北视觉检测专业
2026.06.24 车间视觉检测系统
2026.06.24 北京视觉检测系统