企业商机
首页 > 企业商机
首页 > 企业商机

采摘机器人的研发面临着诸多技术挑战,其中复杂环境适应性、果实识别精度、无损采摘技术是三大难点,制约着采摘机器人的进一步发展和普及。复杂环境适应性方面,农田和果园环境复杂多变,光照、温度、湿度不断变化,...

控制技术是采摘机器人高效运转的“大脑”,决定了机器人运动和作业的精细度与敏捷性,实现机器人“更好地走路和作业”。采摘机器人的控制技术主要分为运动控制和作业控制两部分,运动控制负责统筹移动底盘的前进、转...

采摘机器人与物联网技术的融合,构建了“感知—决策—作业—管理”一体化的智慧采摘体系,进一步提升了农业采摘的精细化、智能化水平,推动智慧农业的深度发展。物联网技术可实现采摘机器人与温室大棚、果园管理系统...

苹果采摘机器人是采摘机器人中技术较为成熟、应用较为广的品类,专门针对苹果种植场景设计,有效替代了苹果采摘机械化率低、人工成本高、安全风险大的痛点。我国是全球比较大的苹果生产国,产量占世界总产量的50%...
尽管智能采摘机器人行业前景广阔,但目前仍面临一系列技术、成本与市场层面的挑战,制约着其规模化普及应用。在技术层面,面对全球超过3000种商业种植果蔬的多样性,实现通用型采摘平台依然遥远,特定作物定制化...
实训平台上的课程和项目,不*具备深厚的学术基础,更融入了高度的挑战性和创新性,从而极大地激发了学生的学习兴趣和动力。这些课程和项目不*要求学生掌握扎实的专业知识,更鼓励他们在实践中进行探索和创新。学生...

未来,苹果智能采摘机器人将摆脱 “单机作业” 模式,依托 5G + 边缘计算技术构建多机协同作业体系,实现 “采摘 - 分拣 - 运输” 全流程自动化闭环。在苹果种植基地,多台采摘机器人将通过 5G ...

技术创新是推动智能采摘机器人迭代升级的重要动力,近年来,人工智能、多模态传感与灵巧执行器技术的聚合性突破,使得机器人在非结构化自然环境中的作业可靠性实现了质的飞跃。在AI算法方面,传统模板匹配算法适配...

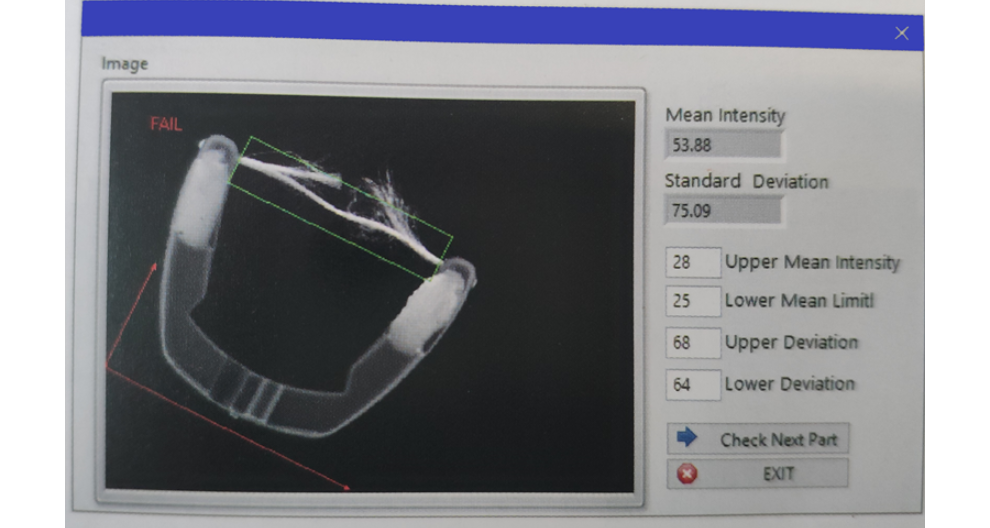
瑕疵检测系统是现代工业 4.0 体系中构建智能质检闭环的基础设施,其技术架构经历了从传统规则化算法到深度学习 AI 模型的跨越式演进。早期的检测系统多依赖人工设定的阈值与边缘特征提取,面对复杂纹理背景...

葡萄采摘机器人是专为葡萄种植场景设计的采摘设备,针对葡萄成串生长、果柄纤细、表皮脆弱、易破损的特点,采用精细识别、轻柔采摘的设计理念,实现葡萄的无损采摘。葡萄多成串生长在枝条上,且容易被叶片遮挡,因此...

采摘机器人的作业效率与稳定性,直接决定了其在农业生产中的应用价值,目前主流采摘机器人的作业效率已远超人工,且具备较强的环境适应性和作业稳定性。在效率方面,不同类型的采摘机器人作业效率存在差异,苹果采摘...
视觉实训平台在高校人才培养中发挥着不可替代的作用,成为高校视觉相关专业深化教学**、提升教学质量的重要支撑。当前,多数高校的视觉类专业(如计算机视觉、数字媒体技术、人工智能、工业设计等)都面临着实训资...

在金属加工行业,瑕疵检测系统的应用有效提升金属产品的表面质量与机械性能,降低生产损耗。金属材料如冷轧钢板、铝合金型材、精密机械零件等,其表面的氧化斑点、划痕、裂纹、麻点、毛刺等瑕疵,会影响产品的外观、...

在玩具生产中,瑕疵检测系统的应用保障了玩具的安全性与外观品质,适用于塑料玩具、毛绒玩具、电子玩具等各类玩具产品。玩具的表面划痕、破损、毛刺、色差、零件漏装、尖锐边角等瑕疵,会影响玩具的外观与安全性,尤...

在纺织行业,瑕疵检测系统的应用实现了面料与纺织品的精细质检,解决了传统人工检测效率低、标准不统一的痛点。纺织品如面料、布匹、针织品等,其表面的断纱、污渍、色差、破洞、跳线、纬斜等瑕疵,会影响产品的外观...
露天采摘机器人主要应用于露天果园和蔬菜种植基地,针对露天环境复杂、光照变化大、障碍物多、地形多样的特点,采用抗干扰、抗恶劣环境的设计,实现露天场景的自动化采摘。露天采摘机器人的移动底盘多采用履带式设计...

数据安全与隐私保护,是瑕疵检测系统在数字化时代必须正视的重要挑战。系统在运行过程中会采集和存储大量的产品图像、生产数据,这些数据可能包含企业的重要工艺参数、商业机密。同时,在对接云端进行数据共享与模型...
定制视觉检测服务,让您的产品检测更加高效、准确。传统人工检测依赖人工逐一排查,不每人每小时能检测数十件产品,还易因疲劳、视觉误差导致漏检、误检。而定制视觉检测服务搭载高速工业相机与智能算法,每秒可完成...
定制机器视觉检测服务的个性化优势,体现在能够满足同一行业不同企业的差异化需求,即使是同一行业、同一类型的产品,不同企业的生产工艺、质量标准、产线布局也存在差异,通用型检测设备无法完全适配。定制化服务会...
采摘机器人的维护与保养是确保其长期稳定作业的关键,合理的维护与保养不*能延长机器人的使用寿命,还能提升作业效率,降低运营成本。采摘机器人的维护主要包括日常检查、定期保养和故障维修三部分:日常检查主要针...
定制机器视觉检测服务在提升检测精度的同时,能够大幅提升检测效率,助力企业实现降本增效。传统人工检测的效率通常为每分钟20-50件,且受疲劳、情绪、经验等因素影响,漏检率高达5%-20%,而定制机器视觉...
AI算法开发是定制机器视觉检测服务的**竞争力,也是实现精细检测、智能判断的关键。不同于通用算法,定制化算法会根据企业的产品特性和检测需求,进行针对性训练和优化,能够有效识别复杂场景下的各类缺陷,降低...
选择定制视觉检测服务,为您的企业注入新的品质动力。在企业发展过程中,品质提升往往需要技术创新的推动,定制视觉检测服务正是借助先进的机器视觉技术,为企业品质管理升级提供助力。引入定制视觉检测后,企业可突...
定制机器视觉检测服务的全生命周期服务体系,是保障检测系统长期稳定运行、持续创造价值的关键。不同于单纯的设备销售,定制化服务涵盖前期需求调研、方案设计、硬件选型、算法开发、安装调试,中期人员培训,以及后...
定制视觉检测,让您的产品检测更加贴合实际需求。通用检测设备往往存在 “功能冗余” 或 “需求缺口”,难以适配企业个性化场景。我们会从您的实际生产情况出发:若您是小批量多品类生产,将设计可快速切换参数的...

成本高企是制约苹果智能采摘机器人规模化普及的**瓶颈,未来行业将通过 “重要部件国产化 + 硬件配置优化 + 机型分级设计” 三大路径,推动设备成本下降至中小种植户可接受范围。在**部件层面,3D 双...
采摘机器人的操作人员培训,是确保机器人高效、安全作业的重要环节,随着采摘机器人的普及,对操作人员的专业技能要求也不断提高。操作人员不*需要掌握机器人的基本操作方法,还需要了解机器人的结构、工作原理、维...
未来 5-10 年,苹果智能采摘机器人将迎来规模化普及期,预计 2030 年我国苹果主产区机器人采摘渗透率将达到 60% 以上,深刻改变苹果产业的生产方式与竞争格局。从市场需求来看,我国苹果种植面积超...

定制机器视觉检测服务注重系统集成的无缝衔接,确保检测系统与企业现有生产产线、管理系统高效协同,避免对现有生产流程造成干扰。服务团队会根据企业的产线布局和生产节拍,优化检测系统的安装位置和检测流程,实现...

大学、专科院校的实训平台,聚焦应用型人才培养目标,以行业岗位需求为导向,构建“基础实训+专项实训+综合实训”的一体化实训体系,助力学生提升专业技能和实践能力。基础实训阶段,重点培养学生的专业基础操作能...
2026.06.25 广东康耐视视觉检测系统
2026.06.25 江苏视觉检测仪
2026.06.25 湖南缺陷视觉检测
2026.06.25 3D视觉检测咨询
2026.06.24 安徽视觉检测原理
2026.06.24 湖北视觉检测镜头
2026.06.24 安徽自动化视觉检测设备
2026.06.24 湖北视觉检测专业
2026.06.24 车间视觉检测系统
2026.06.24 北京视觉检测系统