立体空间防护传感器在汽车总装车间的底盘合装工位用于检测车身与合装台车的相对位置。合装台车承载发动机和后桥举升,与下降的车身完成对接。传感器安装在合装台车四个角落,向上发射探测波束。车身下降过程中,传感器持续测量台车与车身底盘之间的距离。四个距离值在操作面板上以数字形式显示。当四个距离值均小于10毫米且相互差异不超过3毫米时,控制系统判断对接完成,停止台车举升并发出完成信号。传感器采用超声波测距方式,测量范围为50至500毫米,输出为模拟量4至20毫安电流信号。超声波对车身底盘的油污和灰尘不敏感,测量结果稳定。合装工位存在发动机启动时的噪声和振动,噪声频率可能干扰超声波传感器。传感器接收电路内部带有带通滤波器,只通过40千赫兹附近的频率成分。发动机噪声的频率成分主要集中在低频段,与超声波工作频率不同,因此不影响测量。传感器外壳为压铸铝材质,表面喷涂灰色面漆。安装底座配有橡胶减震垫,降低振动传递。供电线路与动力线路分开布线,使用屏蔽电缆传输模拟量信号。支持多传感器数据融合,统一平台集中管理。内蒙古机器人防护防撞传感器源头厂家
在冲压自动化生产线中,立体空间防护传感器被用于模具区域的安全防护。冲压机滑块上下往复运动,模具区域存在挤压风险。操作人员需要进入模具区域进行换模或清理废料时,传感器检测到人员存在,向冲压机控制系统发送禁止合模信号。冲压机曲轴角度锁定在安全位置,滑块保持在上死点。传感器也能检测模具内部是否有异物。冲压前传感器快速扫描模具型腔,如果型腔内有上一个冲次遗留的废料或工具,输出异常信号。冲压机无法启动,等待人工***异物。传感器的检测波束能够穿透少量油雾和冷却液飞沫。在冲压机高速运行时产生的振动环境中,传感器的安装底座使用橡胶减震垫。减震垫吸收高频振动能量,避免振动传递到传感器内部电路。供电线路与动力线路分开走线,保持200毫米以上的间隔距离。传感器输出信号线使用双绞屏蔽线,屏蔽层在控制器端接地。每班次开始前,操作人员使用测试棒验证传感器功能是否正常,测试棒插入检测区域时传感器应有输出信号变化。吉林机械手失控防护防撞传感器设备制造独自调节各区域灵敏度,精细化管理不同风险等级。

立体空间防护传感器在协作机器人打磨工位中用于区分人体与工件。打磨机器人末端装有气动打磨头,工件固定在台面上。操作人员需要手持工件在打磨头上进行去毛刺作业。传感器安装在机器人底座上方1.2米高度处,向下倾斜15度角探测。传感器能够识别操作人员的手臂和工件之间的差异。手臂表面覆盖工作服,红外反射率较低。工件表面为金属或塑料,红外反射率较高。传感器接收回波强度时,根据反射率差异判断目标的类别。当检测到低反射率目标靠近打磨头时,机器人降低转速。当检测到高反射率目标靠近时,机器人保持正常转速。这种区别处理使操作人员可以安全地手持工件靠近打磨头,而手臂接触打磨头时机器人立即停止。传感器的识别算法在出厂时预置了多种材料的反射率参数。用户也可以自行录入新材料的反射率数据。传感器的探测频率为每秒20次,能够捕捉快速运动的手臂轨迹。安装底座上有角度刻度盘,方便调整探测角度并记录位置。
立体空间防护传感器在电子元器件插件机中用于检测元件引脚是否插入电路板孔位。插件机将电子元件从编带中取出,插入电路板对应的孔位。传感器安装在插装头上方,在元件插入后检测引脚末端与电路板背面的距离。四个引脚全部穿过电路板时传感器测量到的距离较小,有引脚未穿过时距离较大。距离值超过设定阈值时判定为插入失败,插件机停止并将电路板标记为待修品。传感器采用同轴反射式光纤原理,发射光纤和接收光纤并排布置在同一探头内。光纤探头直径为2毫米,可安装在插装头的狭小空间内。光纤放大器主机距离探头3米,使用柔性光缆连接。放大器内部有红光LED光源和硅光电池接收器。检测距离通过放大器面板上的调节旋钮设定,检测范围0至5毫米。电路板材质为FR4玻璃纤维,背面有焊盘和导线。元件引脚材质为锡镀层铜线,反射率高于电路板。传感器根据反射光强度差异判断引脚是否存在。插入失败的元件引脚弯曲或未穿过,反射光强不足。放大器的响应速度为0.2毫秒,插件机插装速度为每秒2次。光纤探头前端安装不锈钢保护套管,套管长度10毫米,防止探头与电路板碰撞。维护人员每周检查光纤端面是否脏污,使用**清洁棒擦拭。IP65防护等级,防尘防水,无惧潮湿、多尘恶劣环境。

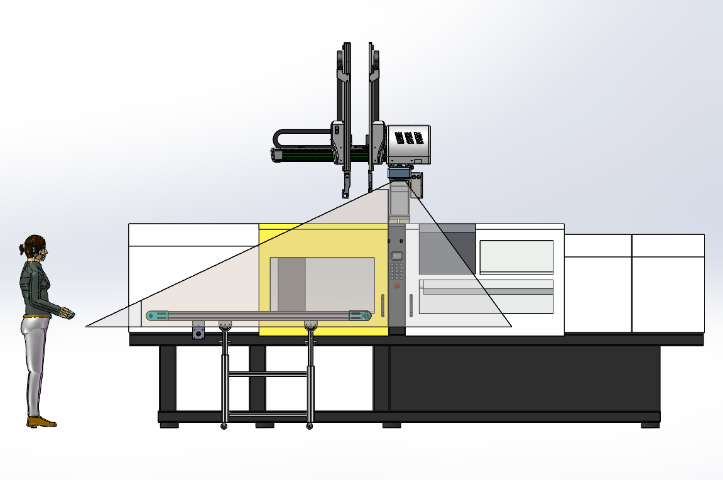
在自动化产线的升级改造中,立体空间防护传感器替代了传统的机械式围栏和光幕。机械式围栏占用地面空间,人员进出需要开门或翻越。光幕只能形成二维平面检测,存在探测盲区。立体空间传感器使用三维探测方式,波束覆盖一个立体锥形区域。区域内部的任何位置只要有目标进入都能被检测到。这种设计允许操作人员在一定范围内自由活动,只有在进入危险区域时设备才会响应。生产线布局调整时,传感器只需要重新设定监测区域参数,不需要移动物理位置。参数设定通过连接调试软件完成,每个传感器的监测形状可以是球形、长方体或自定义轮廓。在不同生产节拍下,传感器响应时间保持稳定。快速移动的设备选用响应时间小于20毫安的型号,慢速设备选用响应时间小于100毫安的型号。安装高度根据设备类型确定。地面移动设备安装高度在200至500毫米之间,空中悬挂设备安装高度在1000至2000毫米之间。可用于特种车辆后装防撞,消防车、矿用车盲区检测。广西AI防护防撞传感器可切换多场景防护区域
调试界面简单、步骤简洁,电气工程师10分钟上手。内蒙古机器人防护防撞传感器源头厂家
立体空间防护传感器在轮胎成型机鼓架区域用于检测操作人员手部位置。轮胎成型过程中,成型鼓高速旋转,操作人员需要将橡胶层贴附在鼓面上。传感器安装在成型鼓上方斜向45度角照射。传感器检测手部与成型鼓之间的直线距离。手部距离鼓面小于100毫米时,成型鼓转速从每分钟300转降至每分钟60转。手部距离鼓面小于30毫米时,成型鼓停止旋转,同时制动器动作使鼓面在1秒内静止。手部移开后,成型鼓自动恢复到设定转速。传感器对人手与橡胶材料的区别有良好的识别能力。人手皮肤的红外反射率与橡胶材料不同,传感器通过回波强度进行区分。当传感器检测到橡胶材料靠近鼓面时不触发减速,只有人手靠近时才触发。操作人员不需要穿戴特殊手套或标记物。传感器的探测波束宽度较窄,在500毫米距离处光斑直径约为30毫米。窄波束能够精确指向操作区域,避免检测到不必要的周边物体。安装时使用激光笔辅助对准,将光斑中心对准成型鼓边缘位置。传感器的面板上有动作指示灯,检测到目标时指示灯点亮,操作人员可以直观确认传感器工作状态。供电采用24伏直流电压,消耗电流为80毫安。内蒙古机器人防护防撞传感器源头厂家
深圳市大德恒通科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市大德恒通科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!