冲压自动化生产线中,拆垛机械手从料垛顶部抓取板料送入清洗机和涂油机。立体空间防护传感器安装在机械手抓取头侧面,检测料垛顶部板料的高度位置。随着板料被逐张取走,料垛高度逐渐下降。传感器测量抓取头与板料表面之间的距离,距离值被用于控制机械手的下降行程。当距离大于设定值时,机械手下降幅度增加。距离小于设定值时下降幅度减小。这种闭环控制使抓取头每次都以相同的高度接触板料表面,避免冲击过大损伤板料或抓取头。传感器也能检测料垛是否倾斜。四个传感器分别安装在抓取头四周,同时测量各自与板料表面的距离。四个距离值相差超过5毫米时,判断料垛倾斜。控制系统发出报警并停止取料,等待人工整理料垛。传感器在板料表面有油膜覆盖时仍能正常工作。油膜厚度不超过0.1毫米时对激光反射率的影响可以忽略。油膜较厚时传感器自动增加发射功率,保持接收信号幅度稳定。传感器的输出为模拟量4至20毫安信号,与机械手控制器的模拟量输入模块直接连接。大德恒通——深耕行业多年,防撞传感器值得信赖的伙伴。黑龙江AI防护防撞传感器可切换多场景防护区域
立体空间防护传感器在汽车总装车间的底盘合装工位用于检测车身与合装台车的相对位置。合装台车承载发动机和后桥举升,与下降的车身完成对接。传感器安装在合装台车四个角落,向上发射探测波束。车身下降过程中,传感器持续测量台车与车身底盘之间的距离。四个距离值在操作面板上以数字形式显示。当四个距离值均小于10毫米且相互差异不超过3毫米时,控制系统判断对接完成,停止台车举升并发出完成信号。传感器采用超声波测距方式,测量范围为50至500毫米,输出为模拟量4至20毫安电流信号。超声波对车身底盘的油污和灰尘不敏感,测量结果稳定。合装工位存在发动机启动时的噪声和振动,噪声频率可能干扰超声波传感器。传感器接收电路内部带有带通滤波器,只通过40千赫兹附近的频率成分。发动机噪声的频率成分主要集中在低频段,与超声波工作频率不同,因此不影响测量。传感器外壳为压铸铝材质,表面喷涂灰色面漆。安装底座配有橡胶减震垫,降低振动传递。供电线路与动力线路分开布线,使用屏蔽电缆传输模拟量信号。宁夏空间防护防撞传感器多组信号输入传感器与支架组装示例图见手册,按图操作零失误。
食品加工、医药生产、畜牧养殖等行业,需要定期对设备和车间进行水洗清洁。普通传感器难以承受高压水枪冲洗或潮湿环境。大德恒通防撞传感器达到IP65防护等级,完全防尘,并可抵御来自任何方向的低压喷水。这意味着传感器可以在潮湿、多尘甚至需要定期冲洗的环境中长期稳定工作。外壳采用工业级密封设计,接口处使用防水接头,确保水汽无法侵入内部电路。对于需要频繁清洁的行业,这一特性使得防撞传感器无需额外加装防护罩,直接暴露安装即可,既美观又实用。
立体空间防护传感器在化工原料自动称重系统中用于检测料斗是否放空。粉状原料通过螺旋输送机送入称重料斗,达到设定重量后停止进料,然后底门打开将原料放出。传感器安装在料斗锥体部分的侧壁,检测料斗内是否有原料残留。料斗放空时传感器输出无料信号,控制系统关闭底门,开始下一次称重循环。料斗内有原料残留时传感器输出有料信号,底门保持打开状态直到排空。传感器采用电容式原理,检测电极贴在料斗外壁,不接触原料。料斗内有原料时介电常数发生改变,传感器输出变化。不同种类的化工原料介电常数不同,传感器灵敏度通过面板上的电位器针对每种原料单独校准。校准步骤为:空斗状态下调节零点电位器使输出为0伏,满斗状态下调节量程电位器使输出为10伏。传感器输出为模拟量电压信号,接入称重控制器的模拟量输入端口。料斗材质为304不锈钢,厚度为3毫米。传感器能够穿透金属壁检测内部原料,但金属壁的厚度会影响检测灵敏度。料斗壁厚超过5毫米时需选用更高灵敏度的传感器型号。供电为24伏直流,消耗电流为50毫安。外壳材料为聚碳酸酯,具备一定的耐化学腐蚀能力。机械手取放料时,防撞传感器不会因工件通过而误停。

移动机器人在仓库和车间内行驶时,立体空间防护传感器为其提供环境感知与定位能力。机器人需要知道前方通道是否有障碍物、两侧货架之间的距离是否足够通过、地面是否有凹陷或凸起。传感器发射探测波束,覆盖机器人周围的三维空间。回波信号被接收后,内部处理器计算出障碍物的距离和方位。这些信息被传递给导航系统,用于实时更新机器人的行进路径。当传感器检测到前方有静态障碍物如货架立柱时,机器人提前规划绕行路线。当检测到动态障碍物如其他移动设备或人员时,机器人降低速度并等待障碍物离开。在狭窄通道中,传感器测量两侧剩余空间,确保车体不会刮擦货架。传感器的探测距离可根据环境调整,**短为0.1米,**长为10米。外壳防护等级为IP65,抵抗车间内的灰尘和水汽。安装时需确保传感器视野不被车体自身结构遮挡。矿山设备加装,抗震防尘,适应恶劣工况。青海机器人防护传感器
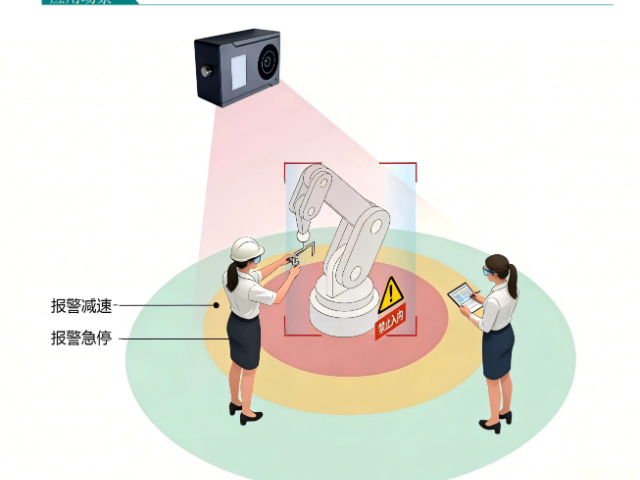
传感器与设备互控,可动态切换防护场景。黑龙江AI防护防撞传感器可切换多场景防护区域
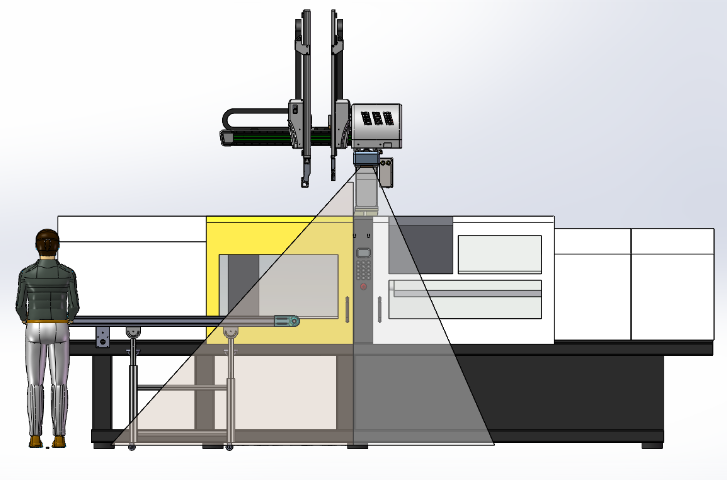
桁架机器人在自动化加工单元中承担工件上下料任务。机器人的横梁和立柱构成框架结构,移动部件沿轨道运行。立体空间防护传感器用于检测移动部件运行轨迹上的障碍物。在机器人高速移动时,如果轨道末端有人员站立或料架位置偏移,传感器能够在碰撞发生前检测到异常。传感器的工作方式包含主动探测和被动接收两种模式。主动模式发射红外或激光脉冲,根据反射时间计算距离。被动模式接收目标发出的红外辐射,用于检测人员存在。两种模式可根据环境光照条件切换。在夜间或低照度车间,主动模式保持正常工作。在白天或强光照射区域,被动模式的灵敏度适当降低以避免误触发。传感器的输出信号直接连接到桁架机器人的安全继电器。安全继电器切断动力电源时,设备所有运动轴同时制动。安装支架设计为可调节角度,使传感器波束覆盖需要监测的区域。维护人员每月检查一次安装螺栓是否松动。黑龙江AI防护防撞传感器可切换多场景防护区域
深圳市大德恒通科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市大德恒通科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!