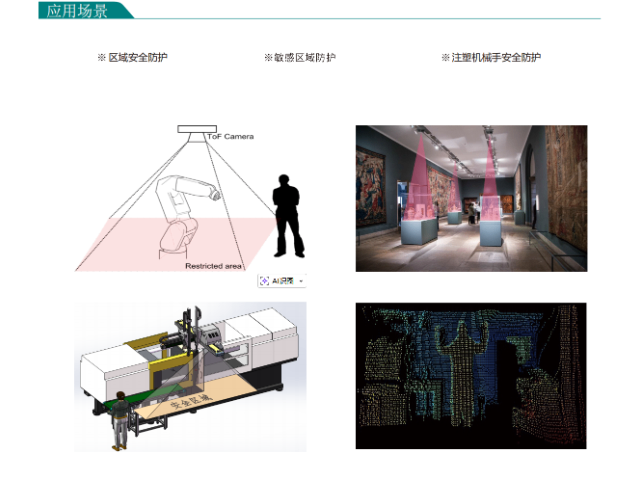
立体空间防护传感器在协作机器人打磨工位中用于区分人体与工件。打磨机器人末端装有气动打磨头,工件固定在台面上。操作人员需要手持工件在打磨头上进行去毛刺作业。传感器安装在机器人底座上方1.2米高度处,向下倾斜15度角探测。传感器能够识别操作人员的手臂和工件之间的差异。手臂表面覆盖工作服,红外反射率较低。工件表面为金属或塑料,红外反射率较高。传感器接收回波强度时,根据反射率差异判断目标的类别。当检测到低反射率目标靠近打磨头时,机器人降低转速。当检测到高反射率目标靠近时,机器人保持正常转速。这种区别处理使操作人员可以安全地手持工件靠近打磨头,而手臂接触打磨头时机器人立即停止。传感器的识别算法在出厂时预置了多种材料的反射率参数。用户也可以自行录入新材料的反射率数据。传感器的探测频率为每秒20次,能够捕捉快速运动的手臂轨迹。安装底座上有角度刻度盘,方便调整探测角度并记录位置。毫秒级响应速度,人员入侵立即停机,为安全生产抢下黄金时间。天津人物区分传感器方案设计
立体空间防护传感器在自动螺丝锁付机中用于检测螺丝是否到位。螺丝由振动盘排列后通过气管吹送到锁付头的夹爪位置。传感器安装在夹爪两侧,检测螺丝是否进入夹爪。螺丝到达时遮断传感器光路,输出到位信号。锁付头下降,电批旋转将螺丝拧入工件。若传感器未检测到螺丝,锁付头保持在上位,不执行下降动作。传感器采用对射式光纤放大器的形式,光纤探头直径1毫米,安装在夹爪的微小空间内。光纤放大器主机安装在控制柜内,通过光缆连接探头。光缆长度2米,弯曲半径不小于25毫米。放大器面板上设有四位数字显示器,用于显示接收光强度数值。操作人员通过示教按钮设定检测阈值,将空载时的接收光强数值加上200作为阈值。当螺丝到达时光束被遮挡,接收光强下降至阈值以下,输出状态改变。传感器的响应时间为0.1毫秒,适应每分钟60个螺丝的锁付节拍。光纤探头表面为玻璃材质,接触油污后透光率下降。维护人员使用无尘纸蘸取酒精擦拭探头端面,每月一次。光缆与放大器连接处使用锁紧螺母固定,防止振动松动。放大器消耗电流为30毫安,输出为NPN集电极开路。山西空间防护传感器可切换多场景防护区域适用于整厂自动化生产线,实现全局智能化安全管控。

立体空间防护传感器在食品包装线的封口机中用于检测包装袋位置。封口机的上下加热板闭合对包装袋进行热封。传感器安装在加热板前方,检测包装袋是否到达封口位置。包装袋随传送带移动,经过传感器时触发信号。信号经过延时后控制加热板闭合。传感器采用对射式红外原理,发射器与接收器分别安装在传送带两侧。包装袋材质为塑料薄膜,部分为透明或半透明。透明包装袋对红外光束的遮挡作用较弱,可能导致漏检。传感器发射器使用经过调制的红外光,接收器对特定频率的光信号进行放大。透明薄膜虽然透光率高,但对红外光有一定的散射作用。散射导致接收器接收到的光强下降,产生有效的开关信号。传感器灵敏度通过面板上的旋钮调节,适应不同厚度和透明度的包装材料。在湿度较高的包装车间,传感器接线盒内放置硅胶干燥剂。干燥剂吸收盒内湿气,防止电路板结露。干燥剂颜色从蓝色变为粉红色时进行更换,更换周期约三个月。传感器的输出形式为继电器触点,触点寿命为1亿次机械寿命和10万次电气寿命。安装支架采用304不锈钢材质,满足食品车间对耐腐蚀和易清洁的要求。
在密集的自动化产线中,多台传感器同时工作可能产生相互干扰,导致误报或漏报。大德恒通防撞传感器内置抗干扰算法,支持多机同时工作而互不影响。无论是多台机械手并排作业,还是AGV小车与固定设备在同一空间运行,每台传感器都能稳定检测各自负责的区域。此外,传感器还具备抗强光干扰能力,避免车间照明或室外光线变化对检测精度的影响。EMC电磁兼容性设计,使其能够抵御电机、变频器等设备产生的电磁干扰。这些抗干扰特性,使防撞传感器能够适应复杂的工业现场环境,确保长期稳定运行。支持以太网通信,远程配置与监控,融入智能工厂网络。
传感器检测到人员入侵后,除了输出停止信号给设备,还可以联动外部声光报警装置。大德恒通防撞传感器配套红绿灯和蜂鸣器,可根据不同报警级别显示不同颜色灯光或发出不同频率的声音。例如,人员进入警戒区时亮黄灯并发出间断蜂鸣;进入危险区时亮红灯并发出持续蜂鸣。这种多级报警机制,既提醒了闯入人员立即离开,也警示周边其他人员注意安全。对于大型车间或嘈杂环境,声光报警是必不可少的辅助手段。传感器输出方式灵活,可自由匹配任意输出及多输出模式,用户可根据现场需求自定义报警逻辑。适用温度范围-15℃~55℃,适应各类严苛工业环境。山西空间防护传感器可切换多场景防护区域
入侵即报警,无论人、物进入防护区域均立即响应。天津人物区分传感器方案设计
桁架机器人在多台机床组成的柔性生产线中承担工件搬运任务。机器人的横梁长度可达数十米,立柱高度超过3米。立体空间防护传感器安装在移动滑座的两端,随滑座一起运动。滑座在横梁上移动时,传感器检测前方轨道上是否有其他滑座或维修人员。当两个滑座相向而行时,各自的前方传感器测量两者之间的距离。距离小于2米时,两个滑座的速度同时降低。距离小于0.5米时,两个滑座的驱动电机同时停止。这种双向避撞机制不需要**控制器协调,传感器之间通过无线通信交换距离信息。传感器内部集成2.4吉赫兹无线模块,通信距离为50米。无线信道占用时间短,数据传输延迟小于10毫秒。传感器供电取自滑座上的24伏直流母线。断电时传感器内部电容储存的余电维持无线模块发送***一次位置信息。导轨末端安装有机械止挡,作为传感器失效情况下的后备防护。传感器的每日自检功能在设备启动时自动执行,自检通过后允许滑座移动。天津人物区分传感器方案设计
深圳市大德恒通科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同深圳市大德恒通科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!