立体空间防护传感器在铸件清理打磨工作站中用于检测砂轮磨损情况。打磨机器人末端装有砂轮,对铸件表面进行打磨。砂轮在使用过程中直径逐渐减小,影响打磨位置精度。传感器安装在机器人臂上靠近砂轮的位置,测量砂轮外缘与参考点之间的距离。初始状态下砂轮直径为200毫米,传感器测量距离为50毫米。砂轮磨损后直径减小,传感器测量距离增加。当测量距离增加到55毫米时,控制系统自动补偿机器人轨迹,使砂轮与铸件的接触位置保持不变。当测量距离增加到60毫米时,控制系统判断砂轮已到达使用寿命,发出更换提示。机器人停止打磨动作,移动到工具更换站等待操作人员更换砂轮。传感器采用激光位移原理,分辨率为0.01毫米。激光光斑尺寸为0.5毫米×1毫米,能够精确照射砂轮外缘。打磨过程中产生的粉尘会沉降在传感器窗口上,传感器的气幕防尘系统使用0.2兆帕压缩空气持续吹扫窗口。防尘系统与机器人动作联动,机器人打磨时气幕开启,机器人待机时气幕关闭以节约压缩空气。传感器外壳防护等级IP65,供电为24伏直流。输出信号为4至20毫安电流,采用三线制连接方式。红色线为空,绿色线为复位线,接线定义清晰明确。山东传感器场景适配
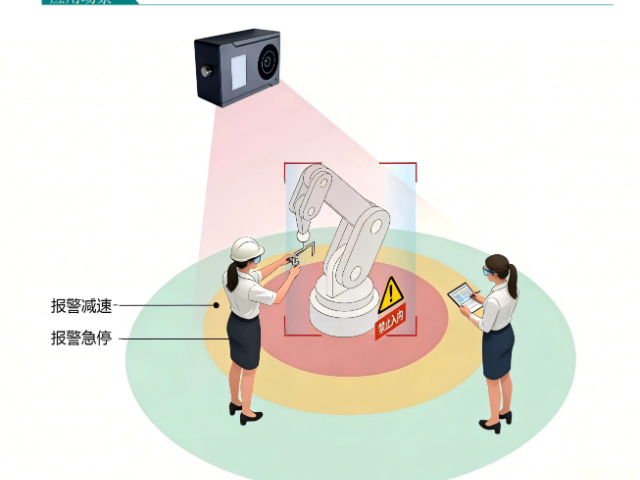
移动机器人在仓库和车间内行驶时,立体空间防护传感器为其提供环境感知与定位能力。机器人需要知道前方通道是否有障碍物、两侧货架之间的距离是否足够通过、地面是否有凹陷或凸起。传感器发射探测波束,覆盖机器人周围的三维空间。回波信号被接收后,内部处理器计算出障碍物的距离和方位。这些信息被传递给导航系统,用于实时更新机器人的行进路径。当传感器检测到前方有静态障碍物如货架立柱时,机器人提前规划绕行路线。当检测到动态障碍物如其他移动设备或人员时,机器人降低速度并等待障碍物离开。在狭窄通道中,传感器测量两侧剩余空间,确保车体不会刮擦货架。传感器的探测距离可根据环境调整,**短为0.1米,**长为10米。外壳防护等级为IP65,抵抗车间内的灰尘和水汽。安装时需确保传感器视野不被车体自身结构遮挡。江苏高精度检测防护防撞传感器可切换多场景防护区域每个区域单独调节灵敏度,精确匹配不同场景需求。

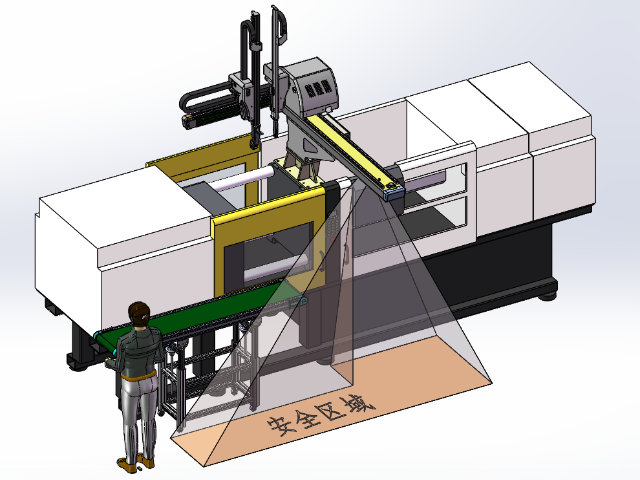
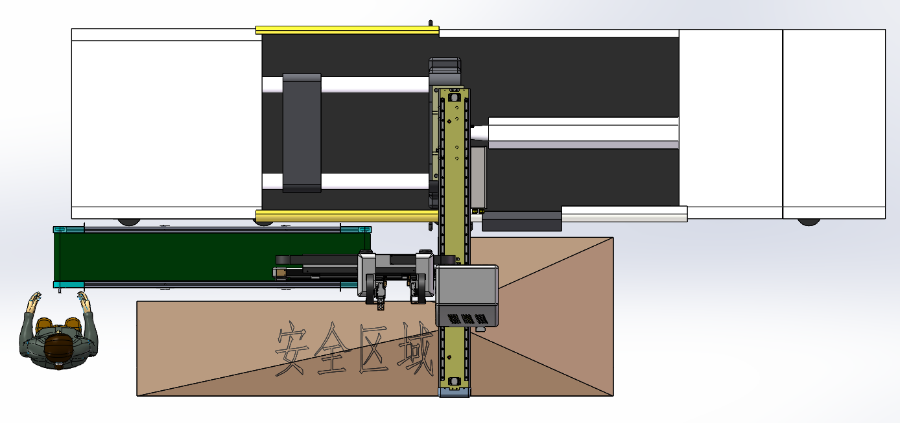
注塑车间机械手从模具中取出注塑件后,需要将注塑件放入输送带或料箱。立体空间防护传感器安装在机械手夹具的侧面,检测注塑件是否在夹具上脱落。机械手开模后进入模具内部取件,夹具闭合夹住注塑件。在机械手退出模具的过程中,传感器持续监测夹具与注塑件之间的相对位置。注塑件从夹具上滑落时,传感器探测到的距离突然增大。控制系统收到距离变化信号后,停止机械手后续动作。机械手保持当前姿态等待人工处理。这种检测避免了空夹具继续进行放置动作,防止后续工序出现空料情况。传感器也能检测模具内是否有残留的注塑件。机械手取件完成后,传感器在模具闭合前快速扫描模具型腔。型腔内若有残留物,反射信号特征与空腔不同,传感器输出禁止合模信号。注塑机顶针保持顶出状态,等待操作人员清理。传感器的响应时间设定为10毫秒,与机械手动作速度匹配。安装时传感器探头与夹具边缘保持齐平,避免探头被工件碰撞。
立体空间防护传感器在饮料灌装生产线中用于检测空瓶输送是否堵塞。空瓶经过洗瓶机后由螺旋分瓶器送入灌装机的进瓶星轮。传感器安装在输瓶链道上方,向下检测瓶子通过情况。链道正常运行时瓶子连续通过,传感器输出持续的脉冲信号。脉冲频率由控制器监测。脉冲频率低于正常值的百分之五十时,表示上游来瓶不足。脉冲频率高于正常值的百分之一百五十时,表示下游有堵塞导致瓶子堆积。控制器根据频率变化判断堵塞位置,启动对应位置的震动器或调整输瓶链道速度。传感器采用漫反射光电原理,检测距离为50至200毫米可调。瓶身为透明PET材料,普通光电传感器难以可靠检测。该传感器使用蓝光LED作为光源,波长470纳米。透明材料对蓝光的吸收率较高,反射信号强度足以触发输出。传感器灵敏度通过电位器调节,对透明瓶和有色瓶均能检出。在灌装区域湿度较高的环境下,传感器窗口定期加热防止结露。加热功率为2瓦,由温度控制器自动启停。维护人员每月使用标准反射板验证传感器检测距离,反射板由陶瓷制成,反射率稳定。毫秒级响应速度,人员入侵立即停机,为安全生产抢下黄金时间。
立体空间防护传感器在自动化饲料包装线中用于检测缝包机前的料袋位置。饲料包装袋在灌装后由传送带送至缝包机进行封口。传感器安装在缝包机入口前方500毫米处,检测料袋是否到达预定位置。料袋到达时光束被遮挡,传感器输出信号触发缝包机启动。缝包机针头在料袋移动过程中完成缝合,料袋通过后传感器光束恢复导通,缝包机停止运行等待下一个料袋。传感器采用对射式光电原理,发射器与接收器分别安装在传送带两侧支架上。饲料车间粉尘浓度较高,普通光电传感器窗口容易积尘导致信号衰减。该传感器窗口配备雨刮式自清洁装置,每隔30分钟刮擦一次窗口表面。雨刮片材料为硅橡胶,动作由微型电机驱动。清洁周期可根据现场粉尘情况通过拨码开关调整,分为15分钟、30分钟、60分钟三档。传感器外壳防护等级为IP65,供电电压为24伏直流。输出形式为继电器触点,触点容量为3安培。安装支架为镀锌钢板冲压件,可沿垂直方向调节200毫米范围。维护人员每周检查雨刮片磨损情况,刮片边缘出现毛刺时更换。接线盒内设有透明观察窗,用于观察继电器动作状态指示灯。适用于3C电子、汽车制造、食品包装等自动化产线。四川3D立体空间安全防护防撞传感器可切换多场景防护区域
龙门机械手、桁架机械手理想之选,立体防护无盲区。山东传感器场景适配
立体空间防护传感器在激光切割机交换工作台区域用于检测工作台到位情况。激光切割机配备两个交换工作台,一个在切割区内进行加工,另一个在切割区外进行上下料。交换动作由液压缸驱动,工作台沿轨道移动。传感器安装在工作台轨道的两端极限位置,检测工作台是否准确到达交换位置。工作台到达预设位置时,传感器输出到位信号,液压缸停止供油。工作台未到位时传感器无输出,液压缸继续保持压力推动工作台前进。传感器采用电感式原理,检测安装在工作台底部的金属挡块。检测距离为8毫米,重复精度为正负0.1毫米。这种接触式检测方式不受工作台上板材堆叠高度的影响。在交换过程中,传感器也能检测轨道上是否有异物阻碍工作台移动。当工作台移动受阻时,金属挡块在设定时间内未能到达传感器检测区域,传感器输出超时报警。控制系统收到报警后停止液压泵运行,防止液压系统过载。传感器的响应频率为1000赫兹,能够捕捉工作台快速移动时的瞬间位置变化。安装支架使用Q235钢材料,表面镀锌处理。接线盒防护等级为IP67,适用于切割车间的金属粉尘环境。山东传感器场景适配
深圳市大德恒通科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在广东省等地区的机械及行业设备中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,深圳市大德恒通科技供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!