- 品牌
- 翊腾
- 型号
- RFID
在实际测量工作中,环境往往是复杂的,极少有通视良好地区,就是在平原地区也是样。为增加作业距离,提高工作效率,我们的做法是:(1)牢记说明书中对基站架设的规定、要求。(2)从地图上或到现场进行勘查,了解地形,明白自己的工作区域,选好基站架设点。通常情况下,比较好选在已知点(校定点)与作业区中间,良好地形时,基站与移动站距离比较好也不要超过,以防个别地段因收不到基站信号而无法作业。(3)基站、发射天线尽可能高架,绝不能架在低洼处或建筑物当中。在山区作业应选择在地形稳固,高程较高,周围通视较好的地方。在城镇测量,应选择在高大安全的楼顶平台架设。在平原乡村地区作业,因房顶多为人字形屋顶,不能架设基站,应手工制作天线加长杆,增加天线高度,以高出平房高度为比较好,减少因穿越房屋而出现的信号衰减,以达到增加距离的目的。(4)基站发射天线的架设还要做到“三防”,即防雷电、防阵风、防***。夏季是雷电的多发期,而我们要求天线尽可能高架,这就出现一对突出矛盾,工作时一定要严防雷击。因此,基站必须有人守护,一旦发现天气异常,立即与移动站联系,同时抢收基站,找一处安全地方躲避,待天气好转再进行作业。 RFID陶瓷天线可以实现长距离的数据传输和读取,提高工作效率。波束宽度RFID陶瓷天线原理
随着科技的发展,人们的测量手段也在不断更新和升级。其中,手机RTK测量技术的出现,为测量行业注入了新的生机和活力。
手机RTK测量技术的特点:
1.高精度:手机RTK测量技术采用了全球卫星导航系统(GNSS),通过获取卫星信号和差分信号,实现厘米级精度的测量。科技含量高:手机RTK测量技术采用了先进的技术手段,具有可性高、自主性强等特点,使用非常便捷。3.高效率:采用手机RTK测量技术进行测量,无需搭建测量站点,能够节省大量的时间和人力成本。 安徽定位时间RFID陶瓷天线翊腾电子的RFID陶瓷天线可以实现自动化识别和追踪。
随着科技的不断发展和进步,RTK测量技术也在不断改进和完善。在未来的应用中,RTK测量将会广泛应用于城市规划、三维地图、智能交通空间定位等领域中,实现更为精确的定位和测量,更好地推动各行业的科技发展。总之,RTK测量技术是目前比较常用的高精度测量技术之一,在实际应用过程中需要注意合理选择设备、避免干扰和多路径效应等问题,以保证测量的准确性和精度。随着技术的不断发展,RTK测量将会在各行业中发挥着越来越重要的作用,推动各行业的技术和发展不断进步,为社会的发展贡献更大的力量。
点放样工程实例:
1、测前准备:获取2~3个控制点的坐标(如果没有已知数据可用静态GPS先进行控制测量),解算或用相关软件求出放样点的坐标,检查仪器是否能正常使用.
2、站的架设:将基准站架设在较空旷的地方(附近无高大建筑物或高压电线等)架设完后安装电台,连接好仪器后开启基准站主机,打开电台并设置频率。
3、建立新工程:开启移动站主机,待卫星信号稳定并达到5颗以上卫星时,先连接蓝牙,连接成功后设置相关参数:工程名称、球系名称、投影参数设置、参数设置(未启用可以不填写),***确定,工程新建完毕。
4、输入放样点:打开坐标库,在此我们可以输入编辑放样点,也可以事先编辑好放样点文件,点击打开放样点文件,软件会提示我们是对坐标库进行覆盖或是追加。
5、测量校正:测量校正有两种方法:控制点坐标求校正参数和利用点校正. 翊腾电子的RFID陶瓷天线适用于智能家居和智能农业。
目前RFID技术在国外发展很快,产品种类也很多。现在RFID技术在国外应用的领域不断扩大,技术日益成熟。德国的KSW-MTCROTEC公司发明了专为衣物设计的可以洗刷的RFID标签;欧洲**银行于2005年开始在其银行单据中嵌入RFID标签:美国沃尔玛公司投入巨资在RFID技术。但是国内RFID技术处于刚刚起步不久,但是研究界,**、企业对这项技术给予极大关注。我国的RFID市场空间巨大,市场需求也快速成长,RFID技术在我国发展的前景非常广阔,对其和其他技术的衔接的研究更有深远意义。食品监管:上海市食药监管部门表示,在世博食品供应链中将***运用RFID电子标签技术,实现食品的安全信息全程源。进入园区的蔬菜、水果、水产品、蛋等初级产品及配送的餐饮半成品等,包装袋上都将戴上RFID标签,这个标签会储存种植养殖企业或生产单位、品名、产地、生产日期、保质期等信息,在**世博食品的物流货车上也配备相应的RFTD设备,对装载冷藏、冷冻食品的车辆配备RFID等温度连续监控设备。在食品进入园区时,工作人员通过手持式RFID读取器,就能在现场快速追溯食品和原料的来源。 翊腾电子的RFID陶瓷天线可以实现远距离读取和识别。深圳芯片 RFID陶瓷天线
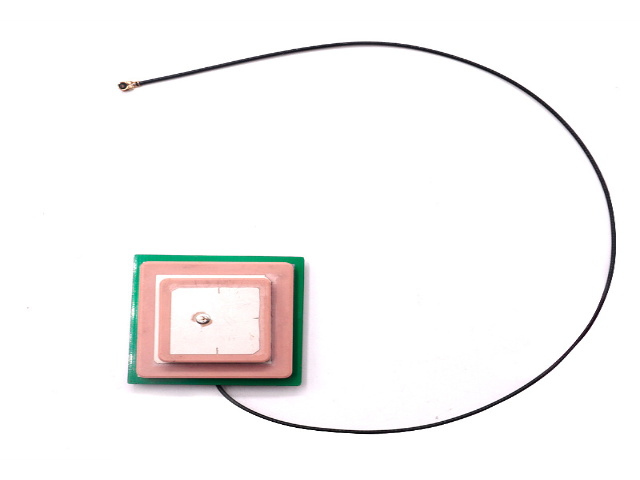
RFID陶瓷天线的工作原理是利用电磁场感应原理,将电能转换为无线电波能量。波束宽度RFID陶瓷天线原理
随着无人机、机器人等机电一体化产品的发展,精确姿态测量技术逐渐成为了研究热点。在这些机器人产品中,需要准确测量姿态,评估其运动状态和姿态信息,以提高位置控制、自主导航和避障能力。传统的基于GPS的姿态测量技术面临着精度低、受干扰强等问题。因此,基于MIMU磁传感器和双天线RTK的姿态测量方法逐渐受到人们的关注。MIMUMEMS惯性测量单元(MIMU)是一种卡尔曼滤波的惯性导航技术,是一种集成惯性导航传感器和数据处理单元于一体的产品,能够对物体的加速度、角速度、姿态等信息进行实时采集和处理。MIMU由加速度计G、陀螺仪M和磁场传感器I等多个部件组成。其中,加速度计G可以测量物体的加速度,陀螺仪M可以测量物体的角速度,而磁场传感器I可以测量物体的磁场变化,这些信息可以用来计算物体的姿态。二、双天线RTK在将MIMU用于姿态测量时,需要将其与RTK相结合,以提高定位精度。RTK全称为RealTimeKinematics(实时动态定位),是一项高精度定位技术。RTK在全球卫星定位系统(GNSS)信号的基础上,通过两个或多个接收机之间的数据交换来确定到达时问的误差,以及其他误差,比如星历和人气层误差。通过利用接收机之问的差分观测数据,可以实现毫米级别的精度。 波束宽度RFID陶瓷天线原理
- 安徽RFID陶瓷天线测试板卡 2024-11-14
- 湖南RFID陶瓷天线GPS101 2024-11-14
- 定位精度RFID陶瓷天线 2024-11-14
- 灵敏度RFID陶瓷天线量大从优 2024-11-14
- 方向图RFID陶瓷天线功效 2024-11-14
- 定位精度RFID陶瓷天线干扰 2024-11-14
- 测试RFID陶瓷天线多少钱 2024-11-14
- CN值RFID陶瓷天线私人定做 2024-11-14
- 波束宽度RFID陶瓷天线放大器 2024-11-14
- 增益RFID陶瓷天线介绍 2024-11-14
- 2D场形图RFID陶瓷天线私人定做 2024-11-01
- 安装RFID陶瓷天线维护方法 2024-11-01