- 品牌
- 星火博特
- 型号
- 通用
室内三维建模融合技术应用说明 在室内三维建模场景中,为实现高精度数字化复刻,采用倾斜摄影与激光扫描融合技术,结合ToF技术创新应用,达成效率与精度的双重突破,满足场景化建模重要需求。 室外区域通过倾斜摄影技术获取多维度影像数据,搭配激光扫描技术弥补单一摄影的精度短板,协同完成数据采集与融合处理,严格控制室外平面精度≤3cm;室内库房场景聚焦结构细节,依托激光扫描的高精度优势,准确捕捉库房墙体、梁柱、货架等结构特征,确保室内库房结构精度≤2cm,实现细节无遗漏的精细化建模。 3D ToF雷达技术重塑行业建模模式,基于飞行时间测距原理,将现实建筑结构快速转化为高精度三维点云数据,经去噪、拼接等处理生成三维模型,实现物理空间到数字空间的准确映射。该融合方案规避单一技术局限,兼顾建模效率与精度,为室内外一体化建模提供可靠技术支撑,适配库房管理、空间规划等多元应用场景。ToF 深度感知与端侧 AI 算法深度融合,无需依赖复杂外部算力,即可实现感知 - 分析 - 决策一体化智能处理。成都双目3D相机避障

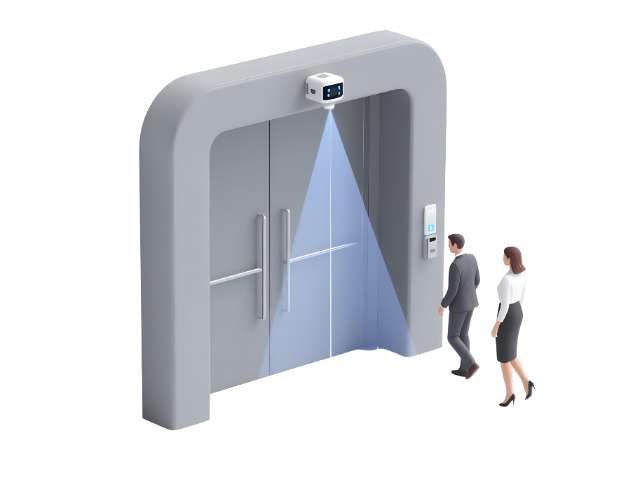
在障碍物感知与规避方面,北极星系列3D激光雷达同样表现优异。3D激光雷达具备近距离补盲能力,可实时识别各类障碍,无论是静态的墙体、立柱,还是动态的行人、车辆。通过精确测算距离与相对速度,安防机器人能够自主调整移动策略,有效避让障碍,在确保自身安全的同时维持巡检任务的连贯执行。此外,该北极星系列3D激光雷达还能实现对人员与物体的准确识别与持续追踪。依托对激光回波信号的分析,机器人可分辨不同目标类型并实时跟踪其运动轨迹。这一功能对于发现行为异常、追踪特定对象具有重要意义。例如,在大型工业园区内,搭载北极星系列3D激光雷达的安防机器人于夜间巡检时,曾准确识别出意图翻越围墙的可疑人员,并立即向管理中心发出预警。期间,机器人自主规避路径上的障碍,快速接近目标区域,为安保人员及时处置争取了宝贵时间。值得强调的是,北极星系列3D激光雷达在低光照、雨雾等恶劣条件下依然能够稳定运行,不易受环境干扰,从而保障安防机器人在多样复杂场景中持续发挥效能。郑州托盘3D相机打印3D TOF相机可分析人员流动轨迹,为商场布局优化、人员调度提供数据支撑,在保障安防安全的同时,。

在空间测绘领域,基于dTOF(直接飞行时间法)的脉冲式扫描仪,凭借准确高效的重要优势,成为外立面与地形测量的重要工具,较广泛应用于工程建设与文物保护等关键场景。该扫描仪采用脉冲激光测距原理,可直接测量激光往返时间计算距离,抗干扰性强,能适应户外强光、扬尘等复杂环境。其±2-5mm的高精度的测量精度,可准确捕捉建筑外立面的细微轮廓、地形的微小起伏,规避传统测量的误差隐患。 相较于传统测绘工具,它的效率提升5-10倍,单站扫描即可覆盖大范围区域,大幅缩短测绘工期。在工程建设中,可快速完成建筑外立面建模、地形勘测定界,为施工设计提供准确数据支撑;在文物保护领域,能非接触式复刻石窟、古建筑等遗存,实现毫米级数字化存档,为修复与研究留存完整数据。 其便捷操作与高适配性,使其成为兼顾效率与精度的推荐工具,助力空间测绘工作提质增效。sparkbot的3D ToF相机和3D ToF雷达,为此场景的实现提供了硬件支撑。
商用清洁机器人依托3D激光雷达,实现商场、写字楼等大型场所的自主清洁。其超宽视场角设计,可同时识别地面垃圾、墙面边角、立柱等障碍物,避免清洁死角。50万点/秒的点云速率,能快速构建清洁区域3D地图,自动规划较优清洁路径,支持分区清洁、定时清洁。≤2cm的测距精度,确保机器人准确贴合墙面、立柱清洁,不遗漏边角污渍,同时避开行人、座椅、展柜等障碍物,毫秒级避障响应,不影响场所正常运营。激光雷达抗强光干扰,可在灯光复杂、光线不足的环境中稳定工作,提升清洁效率与质量。无人叉车主要用于仓储物流、工厂车间等场景,承担货物搬运、货架存取等任务,DT950、DT950Pr。

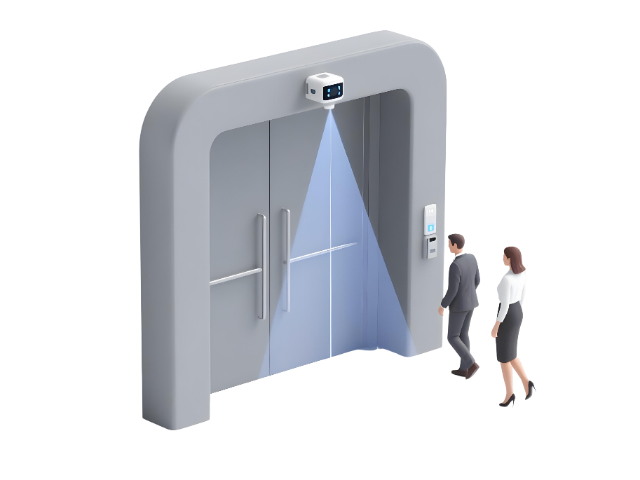
场景:大型商场大厅、走廊,人员密集且流动无序,存在展柜、指示牌、购物车、儿童推车等障碍物,光照明亮且随外界光线变化,空间开阔但障碍物分布杂乱。技术说明:搭载sparkbot 3D ToF相机,融合3D ToF与dToF数据,实现远距离展柜、指示牌的高精度探测与近距离购物车、行人的广域覆盖,突破单一传感器局限。构建多层级环境感知,准确识别障碍物类别,区分行人与固定障碍物,构建商场三维环境模型,深度优化系统延迟,面对行人突然变向、购物车切入等动态场景,实现毫秒级避障反应,智能适应商场明亮光照变化与地面材质差异,保障机器人在密集人群中灵活穿梭,完成导购服务。sparkbot的aura灵光系列产品,采用i tof测量学原理设计,可以提供标准化的硬件模块,也。重庆工业3D相机测量
sparkbot推出的3D视觉检测方案有效解决立体仓库因刚性形变导致的堆垛机误对接失误和卡顿现象。成都双目3D相机避障
该巡检机器人具备多传感融合定位技术,通过多组3D激光雷达SLAM融合,即使在环境发生变化的情况下,仍能保持厘米级定位精度。工业级AI视觉系统支持二维码识别和表计识别,实时传输巡检画面并自动生成数据报表。机器人还具备全天候运行可靠性,IP32以上防护等级确保在复杂工业环境中稳定作业。 3D激光雷达的抗室外强光特性,探测距离可达90米,且在室内昏暗与室外强光环境下性能一致出色,使巡检机器人能够无缝衔接不同光照环境,扩展了应用场景范围。 该巡检机器人在部署效率方面取得明显突破。2000平方米面积的部署时间需40分钟,极大降低了用户的使用门槛。同时,系统支持私有化部署,保护用户数据信息安全,解决了企业对敏感数据泄露的担忧。这款搭载3D激光雷达的巡检机器人已在多个领域展现出色适应性。在企业大型机房中,它能够实现无盲区覆盖,准确识别设备状态;在室内配电站和变电站等危险环境中,其增强的细小障碍物感知能力降低了运行风险;在大型厂房和地下建筑中,360°全向感知为安全运行提供了保证。成都双目3D相机避障
杭州星火博特科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在浙江省等地区的机器人视觉传感器中汇聚了大量的人脉以及市场口碑,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同杭州星火博特科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!

3D激光雷达是变电站智能巡检机器人的重要感知设备,凭借高精度感知能力,实现设备隐患准确排查。其360°全向扫描,可捕捉变电站设备外观、线路连接、接地装置等细节,结合点云数据分析,快速识别设备破损、线路松动、异物遮挡等隐患。高达172万点/秒的点云速率,能实时构建变电站3D数字模型,实现设备状态可视化管理。≤1cm@1σ的探测精度,确保隐患识别无遗漏,配合长期地图维护系统,可跟踪环境变化,适应变电站大型户外场景的长期巡检需求,替代人工完成高空、高压区域巡检,提升巡检安全性与效率。sparkbot团队的3D视觉相机模组助力工业巡检无人机常用于电力线路、石油管道、大型厂区等室外复。苏州库位3D相机识...
- 成都双目3D相机避障 2026-06-18
- 成都客流量3D相机建图 2026-06-18
- 天津立体仓库3D相机定位 2026-06-17
- 广州3D相机定位 2026-06-17
- 成都托盘3D相机扫描 2026-06-16
- 长沙托盘3D相机测绘 2026-06-15
- 深圳3D相机打印 2026-06-15
- 济南体积3D相机打印 2026-06-14
- 成都双目3D相机识别 2026-06-14
- 杭州托盘3D相机雷达 2026-06-13


- 青岛割草机3D相机识别 2026-06-12
- 合肥移动机器人3D相机 2026-06-11
- 广州移动机器人3D相机打印 2026-06-11
- 长沙移动机器人3D相机测量 2026-06-11
- 佛山机械狗3D相机建图 2026-06-10
- 西安客流量3D相机导航 2026-06-09

- 苏州客流量3D激光雷达定位 06-19
- 广州割草机TOF相机统计 06-19
- 武汉双目TOF相机测绘 06-19
- 苏州货架TOF相机打印 06-19
- 杭州AGV3D激光雷达厂家 06-19
- 西安结构光TOF相机厂家 06-18
- 佛山割草机3D激光雷达扫描 06-18
- 成都双目3D相机避障 06-18
- 合肥货架TOF相机识别 06-18
- 成都客流量3D相机建图 06-18