- 品牌
- 星火博特
- 型号
- 通用
3D 视觉技术在无人叉车与货运机器人上的应用前景广阔,重要围绕技术升级、场景拓展与成本优化三大方向,成为推动物流与工业自动化升级的重要动力。 技术层面,将向高精度、低成本、多技术融合演进,ToF 与结构光等技术融合提升感知精度,搭配 AI 算法实现自主学习与动态路径规划,同时替代高价激光雷达,降低硬件成本,推动中小型企业普及。 场景层面,应用将更具柔性与多方面性:无人叉车可实现高位货架准确叉取、冷链低温环境作业,货运机器人能适配动态仓储、跨车间转运等复杂场景,还可与仓储管理系统联动,实现多设备协同作业,覆盖更多行业需求。 产业价值层面,将持续助力企业降本增效,减少人工干预,提升作业安全性与数据可追溯性,同时国产化技术突破推动市场渗透率提升,成为无人叉车与货运机器人实现 “自主决策” 的重要支撑,未来将深度融入智能物流全流程,前景可期。杭州星火博特3D视觉相机提供经济高效的感知方案,在保证检测精度的同时,降低水下检测成本,替代传统。成都双目3D相机识别
3D ToF技术在数字孪生中的应用优势,结合行业场景可细化为三点,准确适配虚实同步需求: 1. 建模高效准确:智慧工业中,可快速采集GE、西门子等企业的生产设备、生产线三维数据,1:1复刻物理场景,大幅缩短建模周期;自动驾驶领域,能快速构建高保真虚拟道路场景,为Waymo、特斯拉等企业节省场景搭建成本。 2. 实时性突出:工业场景中,可实时捕捉设备运行姿态与损耗,同步反馈至孪生模型,助力故障预判;自动驾驶测试中,实时同步虚拟路况与车载传感器数据,保障仿真测试的实时联动,提升测试效率。 3. 环境适应性强:工业车间强光、粉尘环境下,仍能稳定采集设备数据;户外复杂光照下,可准确还原道路、障碍物细节,适配多行业复杂场景,保障孪生模型稳定可靠。郑州人形机器人3D相机模组3D相机是油库、变电站等高危场所安防的理想设备,可实现全天候、无死角安全监测。
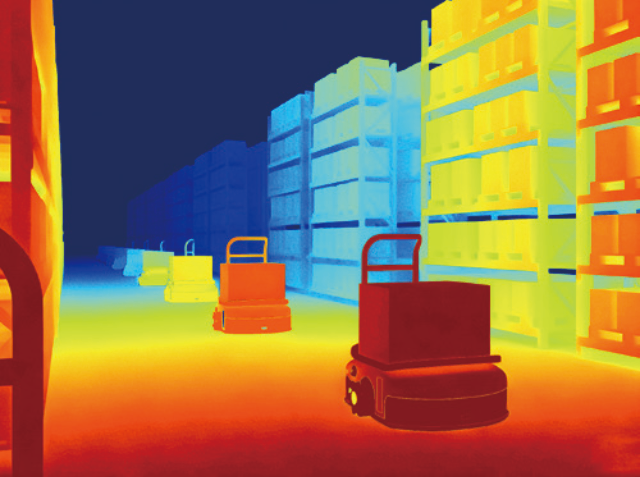
3D激光雷达是仓储AGV机器人的重要感知部件,凭借360°全向视场角,可多方面捕捉仓储内货架、托盘、人员等各类障碍物,杜绝碰撞隐患。其100万点/秒的高密度点云速率,能快速构建仓储实时3D地图,配合SLAM算法实现自主定位与路径规划,无需人工铺设引导线。≤1cm的测距精度,确保AGV机器人准确对接货架货位,误差控制在毫米级,提升货物搬运效率。面对仓储动态环境,激光雷达结合视觉传感器,实现动静态障碍物准确区分,毫秒级避障响应,适配仓库货物频繁移动、人员穿梭的复杂场景,保障24小时高效作业。
林业资源监测领域已实现智能化数字化升级,其监测方案集成3D激光雷达扫描、3D ToF技术、无人机搭载与AI资源分析技术,实现“全域扫描-数据采集-资源核算-动态监测”的闭环管理。工作人员操控搭载3D激光雷达ToF扫描仪的无人机,对林区进行全覆盖扫描,借助ToF技术的植被穿透能力,采集树木高度、胸径、冠幅等高精度点云数据,同步获取林区实景影像,高效完成森林资源普查。系统通过AI智能分析,自动核算森林生物量、碳储量等重要数据,识别病虫害、树木枯萎等异常情况,生成标准化监测报告,支持动态对比分析,形成完整数字化林业资源档案,提升林业资源监测的效率与准确度,助力碳中和目标实现。sparkbot的3D tof相机、3D激光雷达系列产品可以根据合作方现场设置不同的避障模式。

在导航方面,3D视觉技术同样发挥着不可或缺的作用。通过实时获取周围环境的三维数据,机器人能够精确地定位自身在环境中的位置,并规划出到达目标点的较优路径。这种基于3D视觉的导航方式不仅可具有高度的灵活性和自主性,还能够有效应对各种动态变化的环境因素,如障碍物的移动、光照条件的变化等。移动机器人在执行导航任务时,可以利用3D视觉传感器不断感知周围环境的变化,并实时更新自身的位置信息。同时,结合预先设定的目标点和约束条件,机器人可以运用先进的路径规划算法,如AI算法、Dijkstra算法等,计算出一条从当前位置到目标点的较优路径。这条路径不仅可考虑了距离因素,还综合了安全性、可行性等多方面因素,确保机器人在导航过程中能够避开障碍物、顺利通过复杂地形。随着深度学习技术的不断发展,基于3D视觉的场景识别与导航功能得到了进一步的提升。通过结合深度学习算法,机器人可以从大量的三维数据中学习到更加丰富的特征表示和语义信息,从而提高场景识别的准确性和导航的智能性。例如,利用卷积神经网络(CNN)对三维图像进行特征提取和分类,可以帮助机器人更加准确地识别出场景中的不同物体;sparkbot的3D 视觉相机采用i tof原理设计。成都双目3D相机识别
sparkbot团队的DT950、DT950Pro 3D视觉相机成功将低速无人配送车广泛应用于小区。成都双目3D相机识别
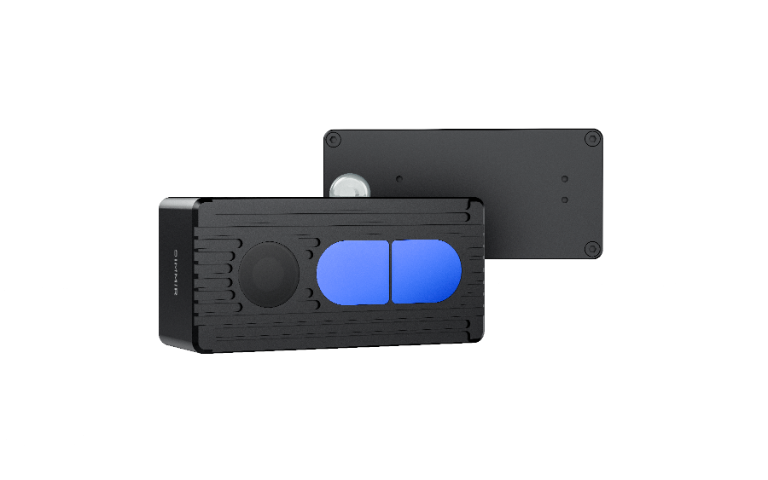
果园采摘面临果实易被枝叶遮挡、定位准确度不足、易损伤果实等痛点,尤其柑橘等果树采摘环境更为复杂。sparkbot 3D TOF相机为采摘机器人搭载重要感知系统,选用DT950型号,120°超广视角可多方面捕捉果树轮廓,5米内≤1cm的测距精度的准确定位果实位置,dToF传感器与全局快门相机融合,快速区分果实与枝叶,避免误剪。通过雷视融合算法,自主规划采摘路径,配合柔性夹持装置,实现“识别—定位—采摘”一体化作业,成功识别率超96%,采摘力度准确可控,减少果实损伤,解决果园采摘工难请、效率低的行业难题,适配柑橘、苹果等多种果树场景。成都双目3D相机识别
杭州星火博特科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在浙江省等地区的机器人视觉传感器中汇聚了大量的人脉以及市场口碑,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同杭州星火博特科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!
在杭州未来科技城一场无人机配送全流程测试顺利开展,而支撑此次测试实现准确导航、安全避障的重点,正是3D激光雷达。凭借其优异的感知性能,为低空物流场景的落地提供了关键技术支撑,也让参与测试的体验者感受到了科技赋能的魅力,此次测试不仅可是低空物流创新的一次实践,更成为3D激光雷达技术实力与应用价值的生动展示。作为低空配送场景顺利推进的重点支撑,3D激光雷达的融入,彻底解决了无人机在楼宇间飞行的导航、避障痛点,让全流程自动化、智能化配送成为可能。此次测试中,无人机之所以能在复杂楼宇环境中准确穿梭、平稳起降,重点得益于3D激光雷达提供的升维感知能力,其与相关定位、通信技术协同发力,构建了高效、安全的低...
- 成都双目3D相机识别 2026-06-14
- 杭州托盘3D相机雷达 2026-06-13
- 郑州割草机3D相机扫描 2026-06-13
- 双目3D相机识别 2026-06-13
- 青岛AMR3D相机导航 2026-06-12
- 沈阳叉车3D相机雷达 2026-06-12
- 青岛割草机3D相机识别 2026-06-12
- 合肥移动机器人3D相机 2026-06-11
- 广州移动机器人3D相机打印 2026-06-11
- 长沙移动机器人3D相机测量 2026-06-11

- 佛山割草机3D相机测绘 2026-06-07
- 杭州机器3D相机测绘 2026-06-07
- 沈阳工业3D相机建图 2026-06-06
- 合肥客流量3D相机测量 2026-06-06
- 天津库位3D相机检测 2026-06-05
- 重庆割草机3D相机导航 2026-06-04



- 杭州托盘3D相机雷达 06-13
- 杭州库位TOF相机避障 06-13
- 郑州割草机3D相机扫描 06-13
- 双目3D相机识别 06-13
- 合肥立体仓库3D激光雷达避障 06-13
- 青岛AMR3D相机导航 06-12
- 佛山割草机3D激光雷达 06-12
- 济南双目3D激光雷达扫描 06-12
- 沈阳叉车3D相机雷达 06-12
- 青岛割草机3D相机识别 06-12