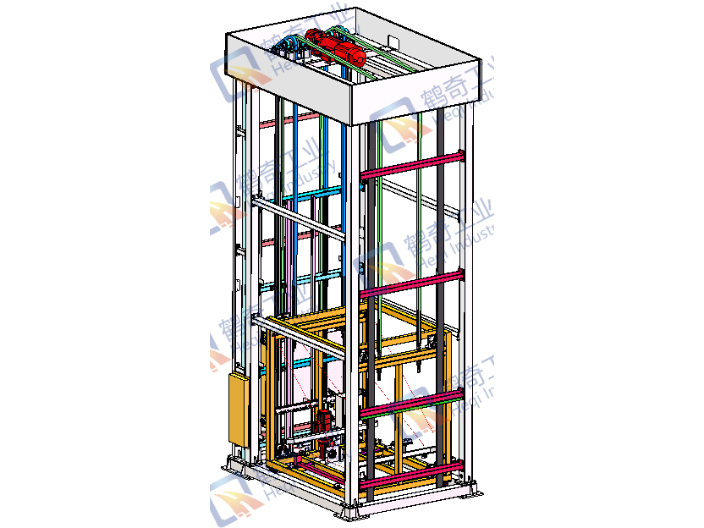
堆垛机从结构形式上区别,目前立体仓库中堆垛机有双立柱结构和单立柱结构。双立柱结构的堆垛机机架由两根立柱和上横梁、下横梁组成一个长方形框架。立柱形式有方管和圆管。方管兼作起升导轨,圆管附加起升导轨。双立柱堆垛机的优点就是强度和刚性都比较好,并且运行平稳。一般对于起重高度较高、起重量较大和水平运行速度高的立体仓库堆垛机多采用双立柱结构。双立柱堆垛机的起升机构,普遍采用链条传动,由电机减速机驱动链轮转动,通过链条引载货台沿立柱或起升机导轨作升降运动。由于链条牵引载货台或配重装置,受空间尺寸限制,传动和布置较复杂,但定位较准确。巷道式堆垛机,可以在货架之间的巷道内运行,一般用于搬运装在托盘上或货箱内的单元货物。徐州全自动堆垛机销售公司

巷道式堆垛起重机主要用于高架仓库。这种起重机的仓库高度可达45米左右。起重机可以在货架之间的巷道内运行,一般用于搬运装在托盘上或货箱内的单元货物;也可以驾驶到相应的货格前,由机上人员按出库要求拣选货物出库。巷道式堆垛起重机的组成有:起升机构、运行机构、货台司机室和机架等,起升机构采用的是钢丝绳或链条提升。机架有一根或两根立柱,货台沿着立柱升降。货台上的货叉可以伸向巷道两侧的货格存取物品,巷道宽度比货物或起重机宽度大15~20厘米。起重量一般在2吨以下,较大达10吨。起升速度为15~25米/分,有的可达50米/分。起重机运行速度为60~100米/分,较大达180米/分。货叉伸缩速度为5~15米/分,较大已达30米/分。上海巷道堆垛机销售厂家单立柱堆垛机在使用上有局限性,不适于起重重量大和水平运行速度高的堆垛机。

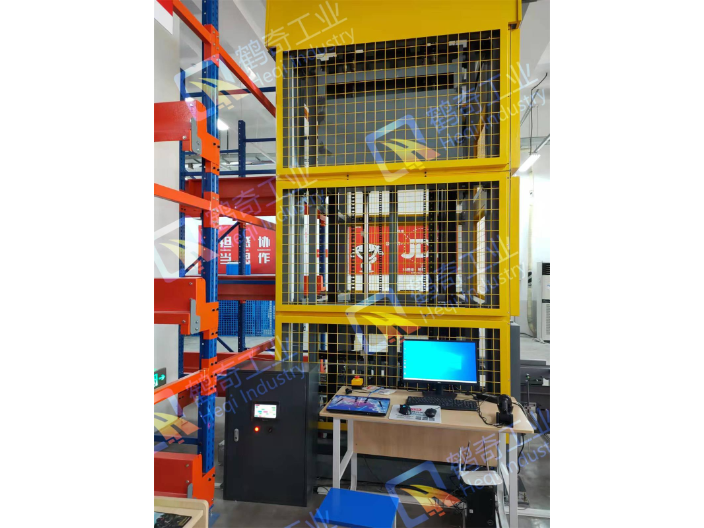
自动堆垛机的工作原理是什么?自动堆垛机属于无人形式。堆垛机通过电气控制系统与仓库管理系统在线协作。堆垛机收到操作指令后,可以在巷道内进行水平行走、垂直提升、货叉拉伸和提升,在指定位置完成货物单元的存取操作,并将货物单元与巷道末端的输送设备或固定输送平台交接,形成完整的自动化仓库物流系统,从而实现货物存取、传输和分拣,自动进出。堆垛机存取货物的速度或高度可以调节,堆垛机的水平高度可以通过编程直接调节,从而提高工作速度。
堆垛机控制系统:堆垛机的控制系统采用西门子STEP7300系列PLC作为上位控制,下位控制由变频器驱动异步电动机实现,堆垛机水平轴、垂直轴、货叉运行均采用变频器控制异步电机调速,通过激光测距传感器、条码定位器、绝对值编码器反馈的位置值来定位。控制系统的网络拓扑通过PN/IE(Profinet)网络协议将PLC与变频器、编码器、激光测距传感器连接,变频器通过现场总线接收PLC发出的启动停止命令,同时将变频器在线数据电流、电压、电机的运行状态反馈至上位控制系统。本项目将变频器的运行信号采集到PLC作为判断堆垛机水平轴完全停车的保护程序。巷道式堆垛起重机的组成有:起升机构、运行机构、货台司机室和机架等,起升机构采用的是钢丝绳或链条提升。

堆垛机使用方法:堆垛机可以在三维空间移动负载:沿着过道中的货架(行驶,x方向);货架高度(升降,y方向);朝向货架(Z方向)。运输部分:堆垛机的基础就是运输部分。这包含一个抗扭钢焊接框架。机架两侧的驱动轮由质量钢42CrMo4制成,强度较高。车轮两侧均采用闭球形滚装机支撑,通过运输部件上的轴承箱连接的轴承。运输部件的驱动通过2个螺旋锥齿轮装置行进。运输部分由导轨上的导向辊引导,确保传动装置的正好对中轮子。轮子滚轮可通过偏心装置进行调整。作为防倾装置的夹轨器是运输部设备的一部分。钢轨刮削机清理导轨上的异物,从而防止车轮损坏。缓冲器与堆垛机上横梁上的缓冲器一起防止与第二台堆垛机发生碰撞。对于维护工作,可以将举升平台放置在缓冲器上。6个双收集器从安装在基础上的导体轨道获取堆垛起重机的动力。堆垛机的基础就是运输部分。上海巷道堆垛机销售厂家
巷道堆垛机的起重量是指被起升单元货物的质量(包括托盘或货箱)。徐州全自动堆垛机销售公司
堆垛机的组成1.金属结构:堆垛机的机架主要由上横梁和下横梁组成,整个机架高且窄;2.行走机构;3.升降机构;4.装载平台;5.存取机构;6.驾驶室;7.安全保护装置:各机构终端限位保护、巷道两端限位保护、货叉与作业联锁、升降机构、限制货箱内货叉微升降行程、检测入库货物虚实、松绳和钢丝绳过载保护、检测货物位置和形状、急停、声光信号,这意味着在堆垛机启动前,它通过铃铛或闪光灯发出信号,警告维修人员或在机器上或巷道内工作的过往人员。8.电气设备:主要包括电气驱动、控制、检测和安全保护。徐州全自动堆垛机销售公司