无人船艇的设计需针对不同水域环境进行优化,以应对河流、湖泊、近海及远洋等多样化场景。在内陆浅水区域,采用平底或浅吃水设计,避免搁浅;在开放海域,则需强化船体结构以抵御风浪冲击。部分极地科考型无人艇配备破冰模块和低温电池,可在零下30℃环境中稳定运行。针对强腐蚀性的海水环境,船体材料多选用碳纤维复合材料或特种铝合金,延长使用寿命。此外,为适应夜间或低能见度作业,部分型号加装红外热成像仪和强光探照灯。这些针对性设计使无人船艇能够在极端条件下保持作业能力,满足科研、勘探等特殊需求。无人船艇的广泛应用,为海洋资源的可持续利用提供了有力支持。上海无轴推进器无人船艇技术参数
无人船艇对于特殊水域有着出色的适应性。在浅滩、沼泽等人类难以到达的水域,无人船艇凭借其小巧灵活的身形和特殊的船体设计,可以轻松穿梭其中。它无需考虑水深对船员和大型船艇的限制,能够深入这些区域进行水质监测、生物调查等工作。在一些水流湍急、环境复杂的江河中,无人船艇的自主航行和智能避障功能发挥重要作用,能够稳定地在湍急水流中执行任务,而不会受到人为操作失误的影响。在高海拔湖泊等恶劣气候条件下,无人船艇也能凭借其良好的抗风、抗寒性能,正常开展工作,为这些特殊水域的研究和开发提供了有力支持。吉林无轴推进器无人船艇成交价船舶智能化改造,小豚智能负责了船舶智能测控平台的信息采集、数据显示、航行控制研究。
在深海生物研究领域,无人船艇需要深入人迹罕至的海域,小豚智能喷水推进器以其强大续航与稳定性能助力科研探索。推进器采用优化的流体动力学设计,有效降低能耗,配合大容量电池,可支撑无人船艇长时间远航。当船艇抵达目标海域,喷水推进器能在暗流复杂的深海环境中,维持稳定的低速航行,确保水下声呐、采样器等设备正常工作。而且,推进器具备抗腐蚀的特殊涂层,在高盐度海水中长期使用也不易损坏,为科学家持续收集深海生物活动轨迹、生态环境数据提供了坚实保障,推动深海生物研究不断取得新突破。
无人船艇在极地科学考察中正发挥着不可替代的作用。针对极地恶劣环境,小豚智能研发的耐寒型无人艇采用特殊材料和加热系统,能在低温环境下稳定工作。这些无人艇可执行冰区测绘、水温监测、气象观测等任务,获取传统载人船只难以到达区域的数据。相比有人考察船,无人艇具有成本低、风险小、部署灵活等优势,特别适合执行长期、重复的观测任务。随着极地科考需求的增长,具备自主破冰能力的无人艇将成为极地研究的重要工具,为人类认识极地环境提供新的技术手段。东莞小豚智能的无人船艇通过持续技术创新,推动智能水上装备行业的快速发展。

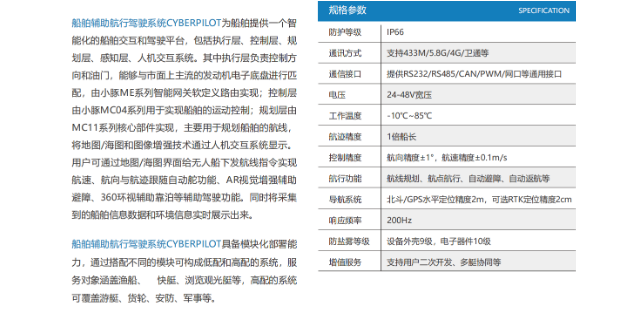
在农业领域,无人船艇也展现出独特价值。对于大面积的水产养殖区域,人工监测水质和管理投喂不仅耗费人力,还难以做到精细。小豚智能无人船艇搭载了专业的水质分析传感器,能够实时监测水中的酸碱度、溶解氧、氨氮等指标,根据数据分析结果,精细控制饲料投喂量,避免过度投喂造成水质污染和饲料浪费。同时,利用其航行轨迹规划功能,可定期对养殖区域进行多面巡查,及时发现病害迹象,为养殖户提供科学的养殖决策依据,助力精细农业发展,推动水产养殖业的智能化升级。小豚智能的“智能船舶辅助驾驶系统CYBERPILOT”包括执行层、控制层、规划层、感知层、人机交互系统等。上海无轴推进器无人船艇技术参数
无人船艇应用于港口巡检,可替代传统人工巡查,降低运营成本并提高检测精度。上海无轴推进器无人船艇技术参数
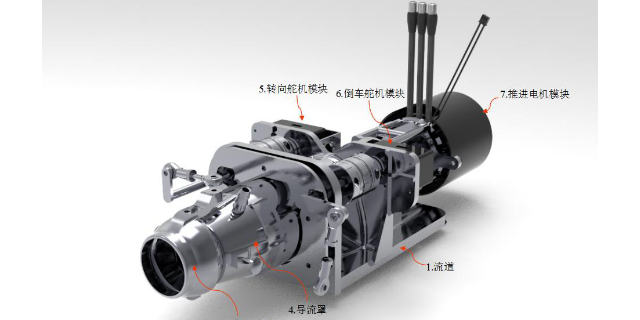
无人船艇是一种通过自主导航或远程控制实现水上作业的智能化装备,其主要技术包括环境感知、路径规划、运动控制和通信传输等模块。环境感知系统通常由雷达、激光雷达、摄像头及多普勒声呐组成,能够实时采集水域的障碍物分布、水流速度和水深数据;路径规划算法则基于感知信息生成比较好航行路线,确保避障与任务执行的协同性。运动控制模块通过调节推进器和舵机角度,实现航向、航速的精细调整。通信系统支持4G/5G、卫星或无线电传输,保障岸基指挥中心与船艇的实时数据交互。此外,无人船艇的能源系统多采用锂电池或太阳能混合供电,以满足长时间作业需求。这些技术的集成使无人船艇能够适应测绘、巡逻、水质监测等多样化场景,成为现代水上作业的重要工具。上海无轴推进器无人船艇技术参数