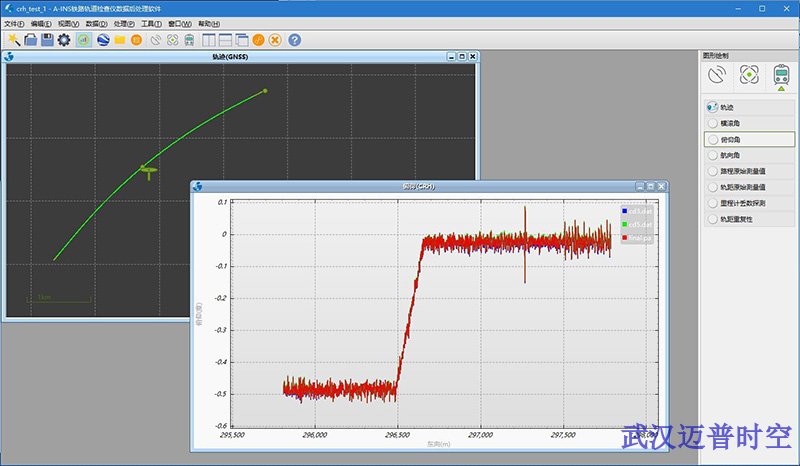
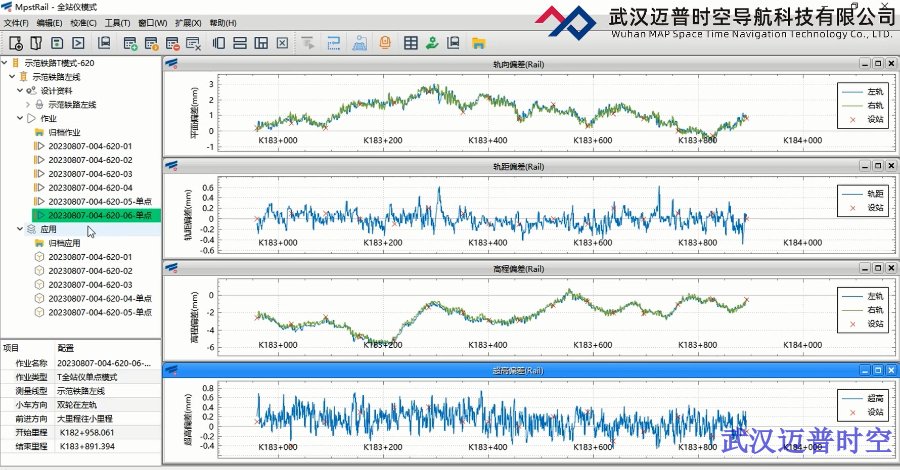
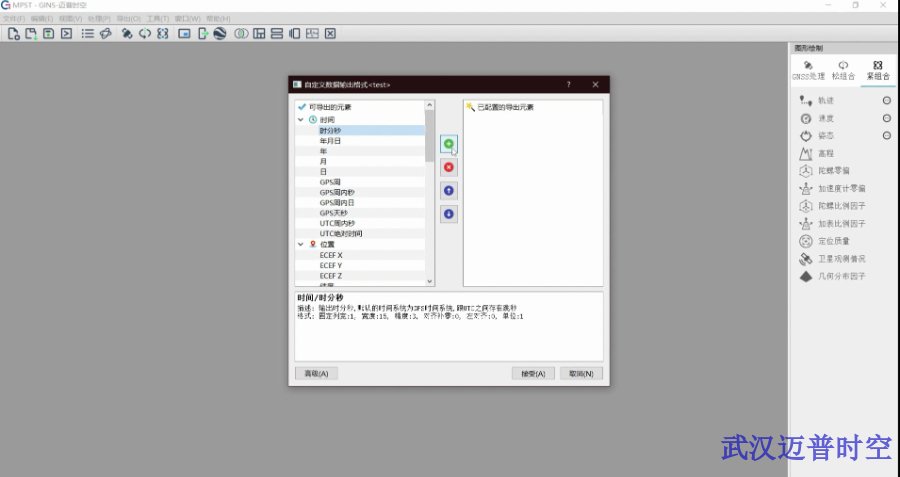
迈普时空InsRail软件的轨道参数测量结果可以直接导出为多种行业标准格式,方便与其他专业软件进行数据交换和深入分析。对于需要导入线路设计软件进行对比的场景,软件支持导出DXF格式的轨道中线三维多段线,可以直接在AutoCAD中打开,与设计线型进行叠加比对。对于需要进行精细动力学仿真的用户,软件可以导出包含精确里程、三维坐标、超高、轨距等参数的文本文件,作为仿真模型的输入。对于需要制作专题图或报告的场合,软件可以将波形图和断面图导出为高分辨率的图片,直接粘贴到文档中。对于需要存档或向业主提交成果的,软件可以生成包含全部测量数据和统计报表的PDF文件。这种开放的数据输出策略,使得InsRail能够很好地融入用户现有的技术生态,成为数据处理链条中承上启下的关键一环。迈普时空InsRail轨道不平顺分析涵盖轨向不平顺、高低不平顺、三角坑和超高不平顺。河南轨检数据后处理软件厂家联系方式
MP-DAM实时监控软件的强大之处不只在于数据的可视化呈现,更在于其对MP系列硬件设备的全、面参数配置能力。通过软件清晰直观的配置界面,用户可以像操作智能手机一样轻松完成对设备工作模式的设置,包括选择GNSS/INS组合导航的对准方式、调整数据输出频率、配置Ntrip服务账号以获取实时差分信号、设置卫星接收机原始数据的记录与输出等。软件还提供了灵活的联网配置选项,支持4G移动网络和有线网络连接,并允许用户根据现场网络环境选择自动获取IP或设置固定IP。这种将复杂指令集封装为图形化选项的设计理念,使得现场操作人员无需记忆繁琐的命令行格式,也无需在多个配置工具之间来回切换,大、大简化了设备部署和参数调整过程,降低了现场操作的出错概率,确保每一次外业采集都能在蕞优的设备配置下进行。新疆轨道检测仪数据处理软件定制迈普时空MP-GINS的GNSS中断仿真处理帮助用户评估不同场景下的预期定位精度水平。
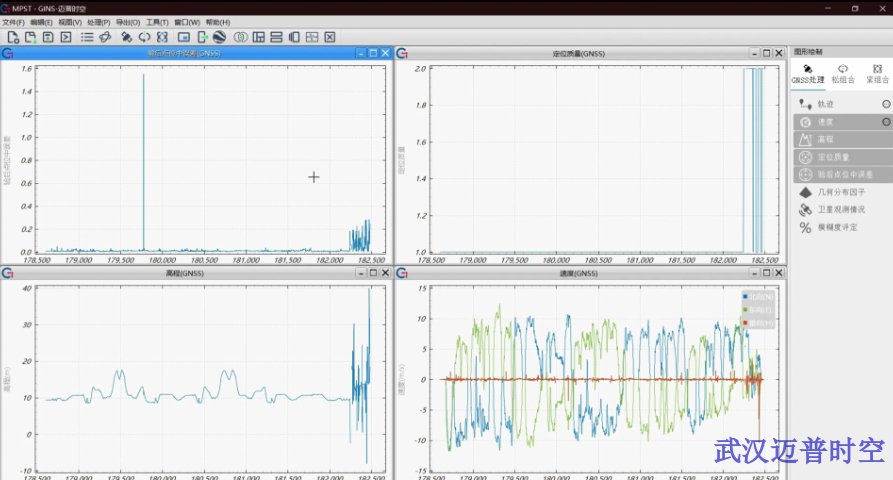
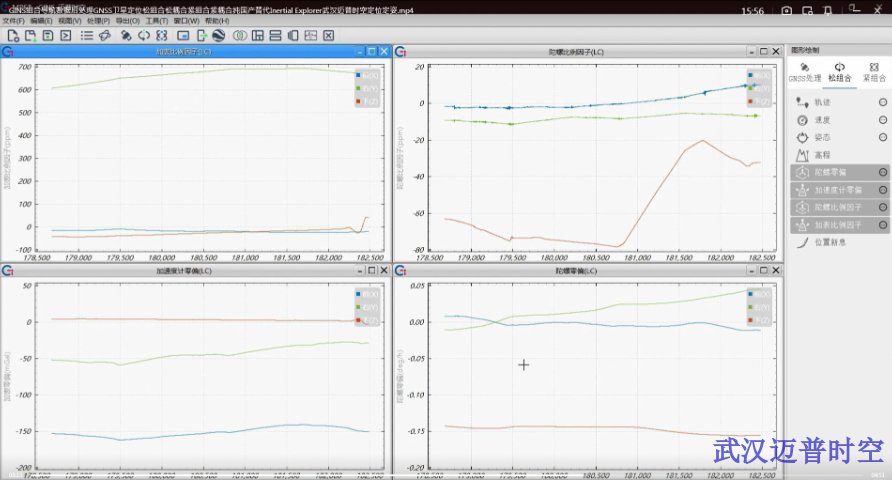
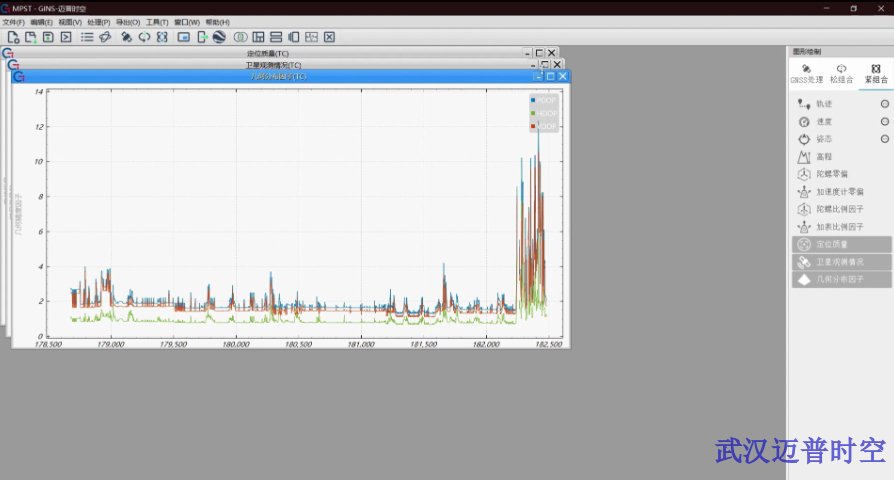
在城市峡谷、高架桥下、隧道出入口等卫星信号遮挡严重的区域,传统组合导航系统往往会因为卫星失锁而导致轨迹漂移,严重影响移动测量数据的可用性。迈普时空MP-GINS软件凭借其先进的紧组合解算技术,为这种复杂环境下的高精度测量提供了完美的解决方案。在紧组合模式下,软件不再单纯依赖卫星数量,而是将原始的GNSS伪距、载波相位观测值与IMU测量数据进行深层次的融合滤波,即使可见卫星数量减少到只有2颗,系统依然能够利用IMU的数据推演和残差约束,有效抑制惯导航误差的发散。这项技术的突破性在于,它改变了以往“有卫星才有精度”的被动局面,实现了在信号部分遮挡环境下定位精度的平稳过渡。对于频繁穿梭于城市高楼间的移动测量车而言,启用紧组合模式意味着不再需要在信号差的路段进行减速或停车等待,大、大提升了数据采集的效率和轨迹的平滑性,确保蕞终生成的点云或影像数据具有连续准确的空间参考。
工程向导+高级选项:新手与专、家的共同选择 MP-GINS在设计之初就充分考虑了不同用户群体的使用需求。对于初次接触惯导后处理的新手用户,软件提供了清晰直观的工程向导,一步步引导完成数据导入、参数设置、解算执行和结果输出,让复杂的数据处理变得简单易行。而对于经验丰富的行业专、家,MP-GINS则开放了丰富的高级选项,包括滤波器参数调整、IMU误差模型优化、多基站联合解算配置等,满足各种专业应用场景的精细化需求。这种人机交互设计的匠心独运,使得MP-GINS既能快速上手,又能深度定制,成为从学生到教授、从技术员到总工的共同选择。迈普时空MP-GINS提供本地化中文软件界面,国内专业技术支持团队,沟通无障碍,服务更及时。
迈普时空MP-GINS软件在数据处理精度上树立了行业标、杆,它能够实现厘米级的定位精度,为各类高精度测绘项目提供了可靠的数据基础。具体技术指标显示,在基线长度小于25公里的范围内,软件能够达到水平精度2厘米+1ppm、垂直精度3厘米+1ppm的优异表现,这意味着即使是在长达10公里的基线两端,其水平误差也能控制在3厘米以内,完全满足1:500大比例尺测图、精密工程测量和变形监测等严苛应用的需求。这一精度水平的实现,得益于软件核、心算法对GNSS载波相位观测值的精细处理和对IMU误差模型的准确标定,它能够有效消除卫星轨道误差、电离层对流层延迟以及惯性器件漂移等多种误差源的影响。无论是应用于无人机航空摄影测量中的高精度姿态控制,还是地面移动扫描系统中的轨迹解算,MP-GINS都能确保蕞终成果的几何精度,让用户的后处理数据经得起任何专业检验。迈普时空MP-GINS支持命令行解算与SDK模式,易于集成至一体化解决方案和自动化流程。上海铁路轨道测量仪数据处理软件服务商
迈普时空MP-GINS后处理软件,发挥GNSS/INS设备蕞优性能,提供高精度三维位置速度姿态。河南轨检数据后处理软件厂家联系方式
迈普时空MP-GINS软件的车载运动约束功能,是针对陆上交通工具运动特性而开发的精度增强技术,它巧妙地将车辆的物理运动规律作为虚拟传感器融入组合导航解算中。在车辆正常行驶过程中,除非发生侧滑或跳跃,否则其侧向和垂向的速度理论上应为零,这就是所谓的非完整性约束。MP-GINS软件将这一先验知识作为强约束条件加入卡尔曼滤波器,当GNSS信号短时中断时,这些运动约束能够有效抑制惯导航向和水平姿态的误差漂移。同时,软件还利用车辆的速度脉冲信号或CAN总线数据作为里程计辅助,精确测量车辆的前向位移。这些车载辅助功能的综合运用,使得MP-GINS在城市峡谷、林荫道等信号频繁遮挡的环境中,依然能够输出比单纯依靠IMU积分平滑得多的轨迹,大、大提高了数据的内符合精度和外业采集的一次成功率。河南轨检数据后处理软件厂家联系方式
武汉迈普时空导航科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在湖北省等地区的仪器仪表中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同武汉迈普时空导航科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!