- 品牌
- VISEE,慧炬
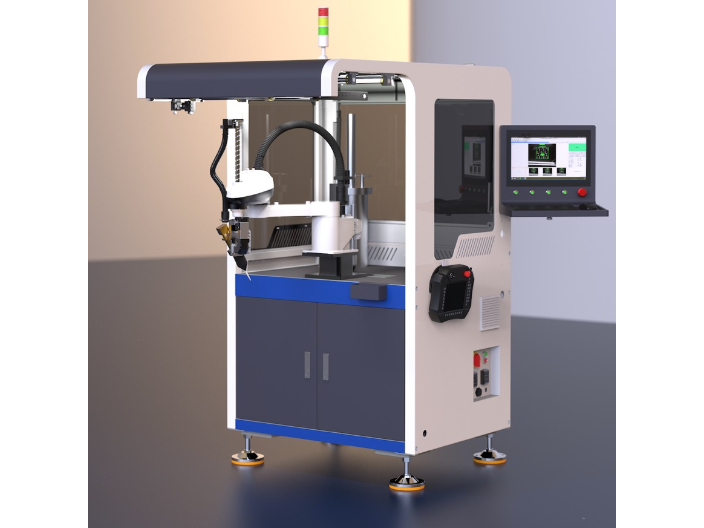
- 型号
- G300
- 类型
- 在线跟随点胶机
- X轴行程
- 450
- Y轴行程
- 380
- Z轴行程
- 200
- 最大负载
- 6
- 移动速度
- 1000
- 重复精度
- ±0.02
- 存储空间
- 128
- 气源
- 0.5-0.7
- 电源
- 220/50
- 功率
- 1500
- 最小吐出量
- 0.1
- 吐出时间调节
- 0.01
- 吐出频率
- 100
- 外形尺寸
- 1100*1400*1800
- 重量
- 500
- 产地
- 广州
- 厂家
- 慧炬智能
太空装备(如卫星、空间站部件)长期暴露在宇宙射线、极端温差环境中,对点胶机的密封涂胶技术提出抗辐射、耐高低温、低挥发的特殊要求。该领域点胶主要用于电子组件封装、结构件密封和线路板防护:电子组件封装采用抗辐射环氧胶,点胶量精度达纳升级,胶层厚度控制在 20-50μm,可承受 100kGy 以上辐射剂量;结构件密封选用硅橡胶,胶线宽度 1-2mm,耐温范围 - 150℃至 200℃,确保极端温差下无开裂、泄漏;线路板防护涂覆三防胶,涂层厚度 10-30μm,防潮、防盐雾、防辐射。点胶机采用真空点胶设计,避免胶层产生气泡,配备抗辐射材质的运动部件和传感器,通过 NASA 的低挥发物标准(TVOC≤0.1%)认证。在我国空间站舱部件生产中,该类点胶机实现了密封件 10 年以上使用寿命,泄漏率≤1×10^-8 mL/(min・Pa)。点胶机的应用范围覆盖电子、医疗、汽车、光伏等多个行业。天津机器人点胶机建议
点胶机
激光辅助点胶技术通过点胶机集成激光预热模块,在点胶前对工件表面进行激光照射,清洁表面杂质并提高表面能,从而提升胶水与基材的附着力,尤其适用于难粘接基材(如 PTFE、PE、硅橡胶)。该类点胶机的激光模块采用光纤激光器(波长 1064nm),功率调节范围 10-100W,照射时间控制在 1-10ms,可控制预热区域和温度(表面温度≤100℃),避免损伤基材。点胶过程中,激光预热与点胶动作协同进行,时间间隔≤50ms,确保基材表面处于粘接状态。在 PTFE 材质的医疗器械部件粘接中,激光辅助点胶使胶水附着力提升 3-5 倍,剪切强度≥2MPa;在硅橡胶密封圈与金属部件的粘接中,粘接处可承受 10 万次以上拉伸循环无脱落。此外,激光辅助技术还能减少胶水用量 15-20%,降低生产成本。山东双阀点胶机企业全自动点胶机的投入使用,大幅降低了对熟练技工的依赖。
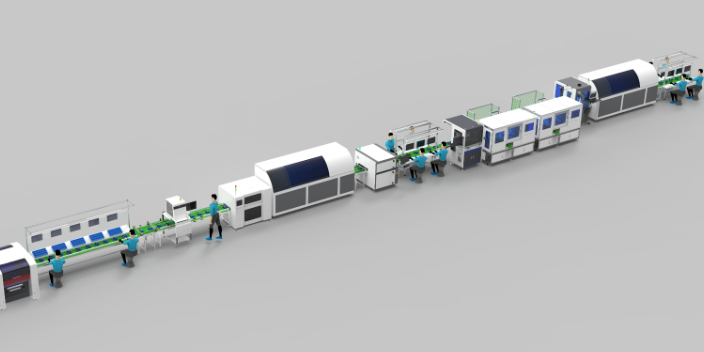
在工业生产中,点胶机很少单独使用,通常需要与其他自动化设备协同工作,形成完整的生产流水线,以达到的生产效果。常见的协同设备包括上料设备、下料设备、治具、固化设备、检测设备、包装设备等。上料设备如振动盘、机器人、传送带等,负责将待点胶工件输送至点胶区域,确保工件定位准确,提高生产效率;下料设备负责将点胶后的工件从治具中取出,输送至下一工序,如固化设备或检测设备;治具用于固定工件,防止点胶过程中工件移动,确保点胶位置,治具的设计需与工件形状匹配,同时便于快速换型;固化设备根据胶水类型选择,如热风烘箱、紫外线固化机、红外固化设备等,用于点胶后胶水的固化成型,确保粘接或密封效果;检测设备如视觉检测机、拉力测试仪、气密性检测仪等,用于对点胶质量进行检测,筛选合格产品,不合格产品及时返工;包装设备则用于对合格产品进行包装,便于存储和运输。此外,在智能化生产线中,点胶机还需与 MES 系统(制造执行系统)对接,实现生产数据的实时采集、分析和追溯,提升生产管理的智能化水平。
轨道交通装备(如高铁、地铁车厢)的轻量化设计对於点胶机的结构粘接技术提出度、轻量化、耐疲劳的要求,用于铝合金、碳纤维复合材料等轻质材料的部件粘接。该类点胶机采用双组分聚氨酯胶或环氧胶混合点胶技术,混合比例精度 ±0.5%,胶线宽度控制在 5-15mm,粘接强度≥30MPa,且胶层具备良好的弹性(伸长率≥50%),可吸收振动冲击。针对轨道交通部件的大型化特点,点胶机采用龙门式或机器人搭载结构,运动行程可达数米,重复定位精度 ±0.01mm;涂胶后通过压力固化装置确保胶层均匀受压,避免气泡产生。在高铁车厢铝型材粘接应用中,该技术使车厢重量减轻 10% 以上,同时提升结构刚性 20%,粘接处耐疲劳测试可通过 1000 万次振动循环无损坏,满足轨道交通的长期可靠性要求。点胶机支持多轴联动,实现复杂曲面和三维空间的点胶。
点胶机在运行过程中可能会出现多种故障,影响生产效率和点胶质量,常见故障包括出胶不均、点胶位置偏差、胶水泄漏、针头堵塞、固化不完全等,针对这些故障需采取相应的解决方法。出胶不均是最常见的故障,主要原因包括胶水粘度波动、供胶压力不稳定、点胶速度不一致、针头磨损等,解决方法包括稳定胶水粘度(加热或降温)、调整供胶压力、校准点胶速度、更换磨损针头等;点胶位置偏差通常是由于视觉定位不准确、运动系统精度下降、工件定位偏差等导致,需重新校准视觉系统、检查运动部件的磨损情况、调整治具定位;胶水泄漏可能是由于供胶管路密封件损坏、点胶阀密封不良、胶桶盖未拧紧等原因,需更换密封件、检修点胶阀、拧紧胶桶盖;针头堵塞多因胶水干结、杂质混入或针头口径过小,解决方法包括清洗针头、过滤胶水、更换合适口径的针头;固化不完全多与固化温度、时间或胶水配比有关,需提高固化温度、延长固化时间或检查胶水配比是否正确。此外,设备运行异常如噪音过大、电机过热等,可能是由于润滑不足、负载过大或电路故障,需添加润滑油、减轻负载或检修电路系统。高性价比点胶机成为众多制造企业提升生产竞争力的利器。广州视觉点胶机厂家
点胶机的技术升级不断提升点胶精度、速度和工艺多样性。天津机器人点胶机建议
一整的点胶机由多个部件协同工作,共同保障施胶过程的性和稳定性。部件包括运动控制系统、供胶系统、点胶执行机构、视觉定位系统、检测系统等。运动控制系统是点胶机的 “大脑”,通常采用 PLC、伺服电机或工业机器人,负责控制点胶头的运动轨迹、速度和位置,实现直线、圆弧、不规则曲线等复杂路径的点胶,重复定位精度可达 ±0.01mm;供胶系统负责存储和输送胶水,包括胶桶、输送泵、压力调节器、加热器(针对热熔胶)等,需根据胶水粘度、特性调整压力和流量,确保胶水稳定输出;点胶执行机构是直接施胶的部件,根据类型分为喷射阀、针筒针头、螺杆阀、隔膜阀等,需控制出胶量和出胶速度;视觉定位系统通过高清相机和图像识别算法,自动识别工件位置和基准点,实现定位,补偿工件摆放偏差,尤其适用于微小工件和高精度点胶场景;检测系统用于实时监测点胶质量,如胶点大小、形状、位置是否符合要求,发现异常及时报警,确保产品合格率。天津机器人点胶机建议
- 四川视觉编程点胶机技巧 2026-06-25
- 河北三轴点胶机销售厂家 2026-06-25
- 单头点胶机销售厂家 2026-06-25
- 北京PCBA点胶机推荐 2026-06-25
- 重庆图像编程点胶机推荐厂家 2026-06-24
- 安徽双组份点胶机 2026-06-24
- 四川线路板点胶机哪家好 2026-06-24
- 天津双组份点胶机哪家好 2026-06-24
- 上海精密点胶机 2026-06-24
- 北京硅胶点胶机技巧 2026-06-24
- 四川点胶机排名 2026-06-24
- 安徽5轴点胶机企业 2026-06-24