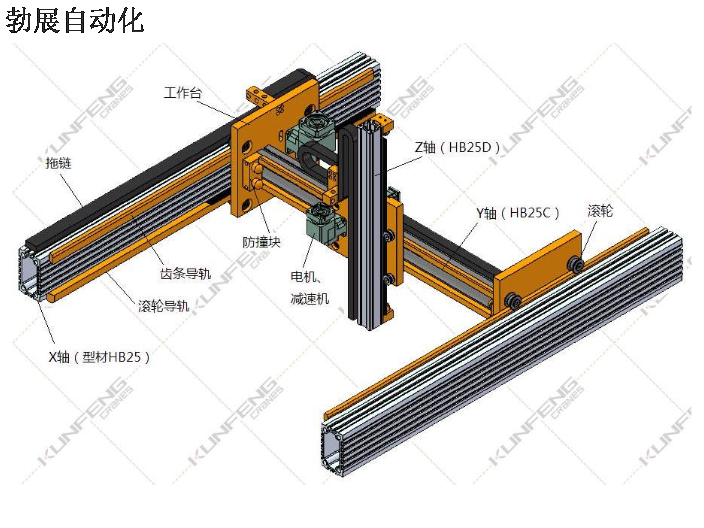
桁架机器人,又称桁架机械手,在工厂自动化中大部分应用于自动上下料、自动堆垛等方面工作;滚轮导轨和齿轮齿条传动系统,在桁架机械手中普遍应用。实现滚轮导轨和齿轮齿条传动系统的自动润滑,方便维修保养工作和延长使用寿命。那么,如何实现滚轮导轨和齿轮齿条传动系统的自动润滑呢?滚轮导轨系统的自动润滑滚轮导轨如何润滑?在弹簧的压力的作用下,毛毡和滚轮导轨表面轻微贴合,油脂由毛毡渗出并涂抹在滚轮导轨的表面;有两种润滑部件:导轨润滑块,轴承密封盖从润滑的角度来说,导轨润滑块已经可以起到足够的润滑作用;如果为了美观和安全性,可以选择轴承密封盖,密封盖的两边也带有毛毡,可对导轨面进行润滑:为了实现自动润滑,不管是导轨润滑块还是轴承密封盖,都需要带有螺纹注油孔:在滑座板上加工出润滑油路来,单点自动润滑器通过油路,再通过油管,经过螺纹注油孔,把油脂注入导轨润滑块或轴承密封盖,这样就实现了滚轮导轨系统的自动润滑:齿轮齿条传动系统的自动润滑滚轮导轨可带齿条;单点自动润滑器,把润滑油脂,经过齿轮齿条自动润滑装置的油路,送入塑料齿轮的出油孔,把油脂涂抹在齿条上:齿轮齿条润滑的目的,促进齿面间的滑动。 浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,有想法可以来我司咨询!湖南重型桁架机械手

桁架上下料又称桁架式机器人也叫做直角坐标机器人和龙门式机器人。是能够实现自动控制的、基于空间XYZ直角坐标系可重复编程的、多自由度的、适合不同任务的自动化设备。它能够搬物、装配、切割、操作工具,以完成各种作业。桁架式上下料采用模块化设计,可以进行各种形式的组合,组成多台联机的生产线。桁架机械手有哪些优势:实用性强(占地面积少,安装限制小)CUBIC桁架机械手可在工厂生产线中自由布置,并且占用的场地面积很小。它可根据实际生产需要设置于较狭窄的空间,不会影响工作精度。而且CUBIC机械手可实现完全定制,也更加适应用户的生产。操作使用简单维护保养方便CUBIC桁架机械手的操作极为简单,可完全在控制柜屏幕上操作,定位抓起点和摆放点即可,无较复杂的人工干预。即便在不懂得操作知识的前提之下,也可以使用该种机械手进行安全生产。在日后保养中,拆卸方便,模块化设计、维护简单。自动化程度高CUBIC高精度桁架机械手采用数控化设计,可实现自动化生产,能够避免人工操作误差,从而保障产品品质稳定;而且它可实现全天候不间断生产,有效地提高生产效率,可代替人工操作,可同时监控多台数控车床;可大幅度减少工人人数,降低用人成本。 南通桁架机械手齿轮桁架机械手设备,就选浙江勃展工业自动化设备有限公司,让您满意,欢迎新老客户来电!

气动助力机械手设计需要注意什么?助力机械手的杠杆率为1:5、1:6、1:7.5和1:10,其中1:6的杠杆率为标准规格。如果增加杠杆率,工作范围可以扩大,但较大增加应相应减少。在铸造、锻造等灰尘较多的厂房使用时,应对旋转减速箱进行良好的密封,否则会影响其使用寿命。平衡臂旋转部分的轴承应用黄油密封。小横臂要有足够的刚度。如果平衡臂满负载上升,小横臂因刚度不足而变形,会影响负载时平衡区的变化。大横臂、小横臂、起重臂、支撑臂等零件的孔距应保证附着杠杆率,否则也会影响空载时平衡区域的变化。旋转减速箱的旋转座上两个轴承之间的距离不应太小,否则会对机械手的旋转部分造成颠覆。安装固定气动助力机械手时,必须先调整水平导向槽的水平度,不水平度不得超过0.025/100毫米。
机械手虽然还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越***地得到了应用。我国塑料机械已成为机械制造业发展**快的行业之一,年需求量在不断的加大。关节机器人。机械手虽然还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越***地得到了应用。我国塑料机械已成为机械制造业发展**快的行业之一,年需求量在不断的加大。关节机器人桁架机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,欢迎新老客户来电!

桁架式机器人选用模块化的制造,可以完结两个以上工位产品的转移完结工件从一个地方到另一个地方的全自动化转移,准确度更高安装也更加的方便。一起因其操作简略可以完结当天培训当天就上岗操作。而且桁架式机器人的通用性很广。实现无人化操作桁架式机器人不只适用于重型工业工件和木板加工的转移,一起可以上下料自动化出产组合成一条全自动化的加工出产线,可不间断的自动完结工件从毛坯到成品的整个加工过程。一起质量的桁架式机器人售后有保障,不需求担心呈现故障维修难的问题。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,有想法的可以来电咨询!嘉兴桁架机械手铝材
浙江勃展工业自动化设备有限公司为您提供 桁架机械手设备,有想法的不要错过哦!湖南重型桁架机械手
桁架机械手结构的刚性:桁架机械手设计中的结构强度及刚性比较低会产生振动,从而造成定位精度较低;运动重量:包括机械手本身及抓取工件的重量,在桁架机械手的设计中一般会根据工件的重量来决定机械手刚性,当我拉抓取的工件重量越重时产生的惯量也就越大,所以在运动件重量增加时,定位精度会降低;控制及定位方式对精度的影响:定位方式采用挡块定位时,定位精度就会与挡块的强度及桁架机械手的运行速度有关,伺服电机定位大于挡块定位;控制采用采用液压及气压控制时,由于受气温影响气压液压会有波动,因些采用伺服控制的稳定性大于气动及液压控制;湖南重型桁架机械手