桁架机械手具备任意角度工作的优点也就是常说的自由度,自由度也就**机械手能够在一定范围内任意角度动作,此项优点也变成了桁架机械手可以满足较为精细化的商品的生产制造需求,也更是由于多自由度工作的优点让桁架机械手能够在许多高精密零部件生产厂家的车间中得到运用。 桁架机械的控制体系: 因为每一车间针对产品生产加工的工艺流程和操作方法是不一样的,因而桁架机械手在设计时就考虑到不一样场所的运用难题,因而桁架机械手是能够根据中后期的反复程序编写及其程序编写改变等方法,让机械手依照变更后的程序代码开展抓举和搬动的,自动控制保持全部的运作均按程序执行。浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,有需要可以联系我司哦!宁波桁架机械手展示

桁架机械手是一种运送工具,越来越得到广的应用。目前,国内外主流的柔性自动化物流体系主要有由桁架机械手运送工件组成的全自动生产体系和由机器人进行上下料组成自动生产线两种方法。在工业兴旺的欧美日等国,由高速加工中 心和桁架机械手组成的灵敏柔性生产体系已经是主流产品,桁架机械手在高空中运送零件,直接把被加工零件从一台机床运送到另一台机床上,桁架机械手兼有工序间运送和主动上下料及物料反转等辅佐功用。因为它运送方便、准确、柔性, 结构相对简捷,便于组合。宁波桁架机械手 厂家排名浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,有需求可以来电咨询!
气动助力机械手设计需要注意什么?助力机械手的杠杆率为1:5、1:6、1:7.5和1:10,其中1:6的杠杆率为标准规格。如果增加杠杆率,工作范围可以扩大,但较大增加应相应减少。在铸造、锻造等灰尘较多的厂房使用时,应对旋转减速箱进行良好的密封,否则会影响其使用寿命。平衡臂旋转部分的轴承应用黄油密封。小横臂要有足够的刚度。如果平衡臂满负载上升,小横臂因刚度不足而变形,会影响负载时平衡区的变化。大横臂、小横臂、起重臂、支撑臂等零件的孔距应保证附着杠杆率,否则也会影响空载时平衡区域的变化。旋转减速箱的旋转座上两个轴承之间的距离不应太小,否则会对机械手的旋转部分造成颠覆。安装固定气动助力机械手时,必须先调整水平导向槽的水平度,不水平度不得超过0.025/100毫米。
桁架机械手的缺点:桁架机械手的高度和长度,以及机械手臂的活动行程一般根据机床外形的宽度和高度以及机床的结构尺寸量身定制,桁架机械手的这种特性导致其只适用于一种机床或者适用于外形尺寸接近(相差不超过100mm)和结构都大致相同的机床。桁架机械手比较大的缺点就是通用性较差。单机桁架机械手案例图片双联机桁架机械手案例图片多联机桁架机械手自动线案例图片二、关节机器人用于机械加工机床上下料的关节机器人采用的轴数一般为6轴,重复定位精度为±,常用的负载重量在10-50kg。关节机器人技术参数机床上下料机器人一般分为一对一、一对二(机床面对面摆放)、一对三(机床摆成品字形),如果想要1套关节机器人对多台机床上下料,需要加上地面轨道,可实现1台关节机器人对多台机床自动上下料。关节机器人的优点:关节机器人比较大的优点就是灵活性强,不受机床结构的限制,能适用很多机床。可拓展范围,除了用在机床上下料,关节机器人还可应用于打磨、抛光、焊接、装配、搬运码垛等领域。关节机器人的缺点:在机床上下料自动化项目中,机器人一般安装在机床的正面,且处于机床开口面即开关门的位置。给机床的日常换刀、调试、维护等操作带来一定的不便。浙江勃展工业自动化设备有限公司为您提供 桁架机械手设备,有想法的不要错过哦!

桁架机械手是什么桁架机械手是新一代先进的工业机械手。我们的工程师为每个应用量身设计抓取装置,当这些定制的抓取装置连接上智能搬运设备时,可以真正被看作是“人类的延伸”。自动导引车和工业机械手已获得汽车、机械、电子和时装行业等大型制造公司的青睐。因为我们专注于客户的需求,从初的概念到试运行及后续投产,为客户提供专业的物料搬运解决方案。桁架机械手产品参数轨道长度行走速度重复定位精度传动方式定制0~1000mm/s±±齿轮传动润滑系统防护机械限位减速机选配钣金或风琴罩标配松下、西门子、选配桁架机械手优点性价比高、经久耐用、科技、抗温性高、厂家直销、品质保证、专业安装、支持定制、抗腐蚀性强桁架机械手应用应用于产品的装配、输送作业现场,亦广泛应用于其他行业的输送系统以及无人化作业现场,并能作为暂存及物流的重要设备与主机设备进行灵活搭配,方便运用。浙江勃展工业自动化设备有限公司是一家专业提供 桁架机械手设备的公司,欢迎新老客户来电!宁波桁架机械手展示
桁架机械手设备,就选浙江勃展工业自动化设备有限公司,有需要可以联系我司哦!宁波桁架机械手展示
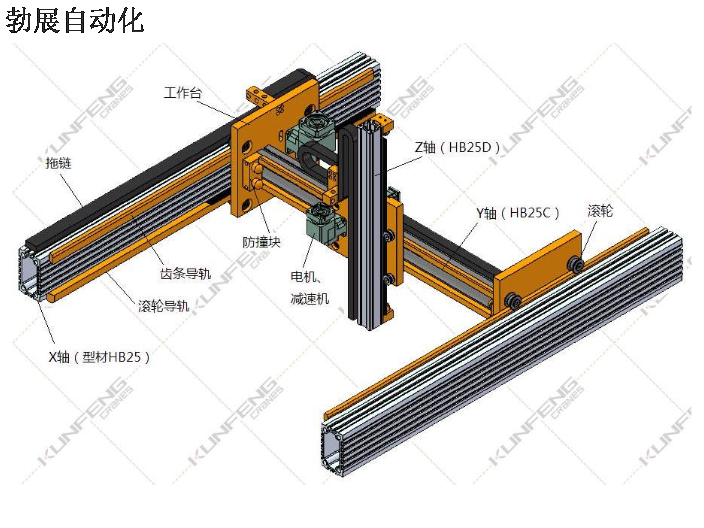
采用桁架机械手输送的柔性加工自动线,可以提高数控企业的生产效率,推动由桁架式机械手输送的柔性加工自动线开始向国际水准迈进。数控机床机械手桁架机械手主要实现机床制造过程的完全自动化,并采用了集成加工技术,适用于生产线的上下料、工件翻转、工件转序等。桁架机械手由主体、驱动系统和控制系统三个基本部分组成。按机器人结构分类为直角坐标型,机械手沿二维直角坐标系移动。主体部分通常采用龙门式结构,由y向横梁与导轨、z向滑枕、十字滑座、立柱、过渡连接板和基座等部分组成,z向的直线运动皆为交流伺服电动机通过蜗轮减速器驱动齿轮与y向横梁、z向滑枕上固定的齿条作滚动,驱动移动部件沿导轨快速运动。移动部件为质量较轻的十字滑座和z向滑枕,滑枕采用由铝合金拉制的型材。横梁采用方钢型材,在横梁上安装有导轨和齿条,通过滚轮与导轨接触,整个机械手都悬挂在其上。 宁波桁架机械手展示




