物流仓储:高速码垛场景痛点电商仓库需在10分钟内完成2000件不同尺寸(300×400mm至800×1200mm)纸箱的码垛传统机械手因路径规划低效导致码垛速度8件/分钟,且空间利用率不足60%高速机械手解决方案技术配置搭载TOF激光雷达实现货箱尺寸实时感知,配合动态堆叠算法优化码放顺序采用碳纤维臂杆减轻运动部件重量,使码垛速度提升至15件/分钟实施效果在京东亚洲一号仓库实现98%的空间利用率,较人工码垛提升40%通过能量回收系统将制动能量回馈电网,单台设备年节电1.2万度浙江勃展工业自动化设备有限公司致力于提供机械手设备,欢迎您的来电哦!舟山上下料机械手机器人

数控机床上下料机器人应用***大多数数控车床机械手的自动化生产线都有主动控制.补偿.校正.护理和其他功能,产生自我维护功能。它可以有效地应用于不同的专业领域,以满足生产需要。数控机床本身具有多种功能,多功能数控机床促进了制造业的快速发展。机床自动化已成为经济增长的主流。数控机床的自动化不*是一个有吸引力的优势,而且也为生产带来了便利,融入了各行各业.各生产类别。装卸机械手广泛应用于自动化生产线。数控车床装卸机械手的卸机械手已成为高新技术领域快速发展的新技术。它促进了机器人机械手的发展,使它们能够结合机械化和自动化。为了降低劳动强度,改善劳动条件,可以说机械手主要用于数控加工。渐渐地,桁架数控车床机械手.数控车床数控桁架机械手和多段机械手的应用越来越***。舟山上下料机械手报价六轴机器人就选浙江勃展工业自动化,重复误差±0.08mm,单工位替代2名工人。

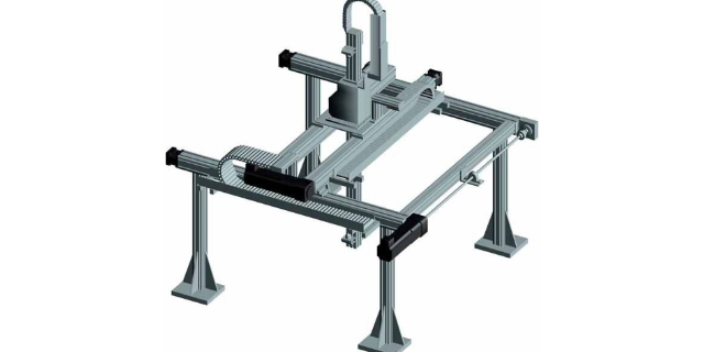
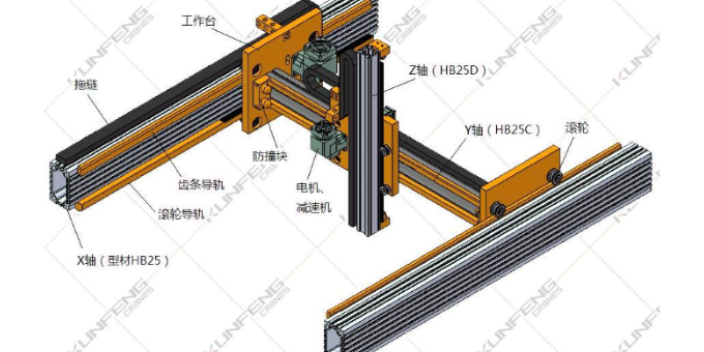
数控桁架机械手主要实现机床制造过程的*自动化,采用集成加工技术,适用于生产线上下材料、工件翻转、工件转动顺序等。桁架机械手由三个基本部分组成:主体、驱动系统和控制系统。根据机器人结构分类为直角坐标类型,机械手沿二维直角坐标系移动。主体部分通常采用由y到梁和导轨的龙门结构,z由滑枕、十字滑座、立柱、过渡连接板和基座组成,z交流伺服电机通过蜗轮减速器驱动齿轮和y向横梁,z将固定在滑枕上的齿条滚动,驱动移动部件沿导轨快速移动。移动部件为轻质十字滑座和Z滑枕,滑枕采用铝合金拉型材。横梁采用方形钢型材,横梁上安装有导轨和齿条。整个机械手通过滚轮与导轨接触悬挂在上面。
浙江勃展工业自动化设备有限公司——桁架机械手,赋能机加工行业智能化升级作为机加工领域的专业自动化解决方案提供商,浙江勃展工业自动化设备有限公司始终以“创新驱动、服务为本”为重要理念,专注于桁架机械手的研发、设计与应用,助力企业实现生产效率与品质的双重跃升。我们的产品以高精度、高稳定性为重要优势,结合定制化服务与全周期技术支持,已成为机加工行业智能化升级的理想选择。服务优势:专业团队,全程护航我们拥有一支由机械设计、电气控制、软件开发等领域技术组成的技术团队,能够根据客户生产线的实际需求,提供从方案设计、设备安装到调试培训的一站式服务。无论是单机应用还是整线集成,我们均以“快速响应、精细交付”为标准,确保项目高效落地。此外,公司建立完善的售后服务体系,提供7×24小时技术支持与定期维护保养,让客户无后顾之忧。应用场景:覆盖机加工全环节桁架机械手广泛应用于数控机床上下料、工件搬运、装配检测等场景。例如,在汽车零部件加工中,机械手可替代人工完成重载、高频的上下料动作,明显提升生产节拍;在精密电子制造领域,其高精度定位功能确保产品良率稳定在。通过与AGV、视觉系统的协同作业。 2.浙江勃展工业自动化设备有限公司是一家专业提供机械手设备的公司,期待您的来电!
数控桁架机械手的位置再现性是对精度的统计。即使在相同的环境、相同的条件、相同的动作、相同的命令下,机械手也可能不会*匹配每个动作的位置,从而产生一定的误差。但是,可控机械手的误差在一定范围内。在测试桁架机械手的位置再现性时,在不同的速度和方向进行的迭代测试越多,位置再现性评估就越准确。位置再现性不受负载变化的影响。因此,位置再现性指标通常被用作示教/再现模式下机器人水平的重要指标。机器手的准确度取决于驱动和反馈装置的分辨率。重复精度比单次精度更重要,如果定位精度不够准确,通常会看到可预测的固定误差,可以通过编程进行修复。再现性定义了通过重复一定次数的运行确定的随机误差范围。来自实验室的一整套气动伺服技术和气动伺服定位系统,此外还开发了微电子技术和***的控制技术。自动化机器人就选浙江勃展工业自动化,200多条产线验证,年替代工时5000小时。衢州上下料机械手定制
浙江勃展工业自动化设备有限公司致力于提供 机械手设备,欢迎新老客户致电!舟山上下料机械手机器人
桁架机械手动作原理?由于桁架机械手输送的速度快、加速度大、加减速时间短,当输送较重的工件时,由于惯量大,伺服驱动电机要有足够的驱动和制动的能力,支撑元件也要有足够的刚度及强度。只有这样,才能使伺服电动机满足桁架机械手输送的高响应、高刚度及高精度要求。由于桁架机械手输送的速度快、加速度大、加减速时间短,当输送较重的工件时,由于惯量大,伺服驱动电机要有足够的驱动和制动的能力,支撑元件也要有足够的刚度及强度。只有这样,才能使伺服电动机满足桁架机械手输送的高响应、高刚度及高精度要求。舟山上下料机械手机器人