宝利苏迪POLYSOUDE换热器管板氩弧机器人焊接设备由以下部分组成:管板直流逆变焊接电源P6,全自动氩弧管板焊接机头,工业机器人,控制系统,摄像监控系统,智能识别定位系统,钨极自动更换系统,实时数据采集系统,焊缝成型检测系统等。设备具有焊接完成后的焊缝质量自动检测功能,初步实现气孔、咬边、管孔直径等质量检测能力;设备具有标准通讯接口,具有并实现焊接参数采集和上传,能实现远程控制和监控功能;能实现设备之间的通讯,便于多机协同同时协助工作。宝利苏迪主管道机器人焊接系统焊接过程中可采集焊接电流,焊接电压,焊接速度,送丝速度等。甘肃悬吊管托块焊接机器人管板焊机

宝利苏迪机器人焊接电源PC600-3具有TIG焊接功能,较强的抗网路电压干扰的能力,焊接过程稳定易操作,通用性好,可靠性高等优点。配备水冷系统,为焊枪提供循环冷却用水,保证焊枪单次连续24小时正常工作。控制系统采用嵌入式操作系统,界面简单易操作,支持键盘鼠标操作。具有离线编程离线打印功能,具备电流、旋转、送丝实现缓变、脉冲功能。具备实时弧长跟踪控制功能,便于操作者实时调整,具有较好的抗磁偏吹能力。参数调整记忆功能,能对焊接过程中调整的参数进行保存及显示调整前后参数对比。焊接过程可随时调整钨极和焊丝的摆动速度、摆宽、电流、焊接速度等焊接参数,以达到在某些焊缝处的特殊要求。自动TIG焊接机器人焊接设备宝利苏迪堆焊机器人采用六轴工业机器人,搭配操作架,能够精确定位焊枪位置,实现所有位置的管板堆焊。
宝利苏迪多机器人管板自动焊接设备智能协作系统保证多机头分工作业,互不干涉,可按照图纸要求及系统划分在划分区域内工作。多机头焊接速度、定位速度等保证相同,四个焊接机头同时工作时,考虑速度差导致的各机头路线变化,在不损失焊接效率的前提下,不造成机头间发生碰撞或设备停止。焊接轨迹的动态变化,智能协同系统可保证系统可知各机头及机器人的空间坐标,根据每台机器人的位置,在移动或焊接过程中提前判断下一个焊接位置是否产生相互干涉碰撞,如产生干涉引导机器人到不产生干涉的位置继续焊接工作。
宝利苏迪自动堆焊机器人系统,堆焊机头安装在焊接操作机上,立柱安装在设备底座上。根据工件配备水平伸缩机构。整体机构的刚性满足焊接机构精度。操作机为电动回转精密操作机,由回转部分,立柱,横梁,控制系统组成。操作机的机械结构设计合理,刚性和稳定性好,各部分功能能满足要求,设备的润滑系统设计完善,能够保证各传动部件的良好方便润滑。立柱回转启动力矩大,启动和停止迅捷,传动精度高,运动平稳,可配合机头实现焊枪初定位。横梁升降平稳,均匀,安全系数高,立柱内配置重平衡装置。堆焊操作机滑架上装有安全防坠自锁装置。宝利苏迪堆焊机器人设备送丝装置包括送丝电机,焊丝盘支架,送丝导管,热丝导电杆,导丝嘴等。

宝利苏迪窄间隙机器人TIG焊接系统具有激光跟踪系统,采用宝利苏迪自有的焊缝跟踪系统,搭配窄间隙焊枪实现自动寻位功能,确保焊接精度与效率。送丝系统包括送丝驱动马达,送丝导管,导丝嘴以及焊丝位置调节机构。六轴工业机器人可对外部轴进行联控,可与行走机构实现联动控制。机器人具有防碰撞功能,具有弧焊系统。设备配备有行走机构,包含可旋转升降的立柱,搭载工业机器人移动,确保机器人运动平稳。设备提供外置冷水箱用于焊枪的冷却。宝利苏迪自动搬运机器人负责将上料端附件存放架中的短管物料依次逐根搬运至热丝TIG焊机前托架上完成上料。广西悬吊管托块焊接机器人自动焊接成套设备
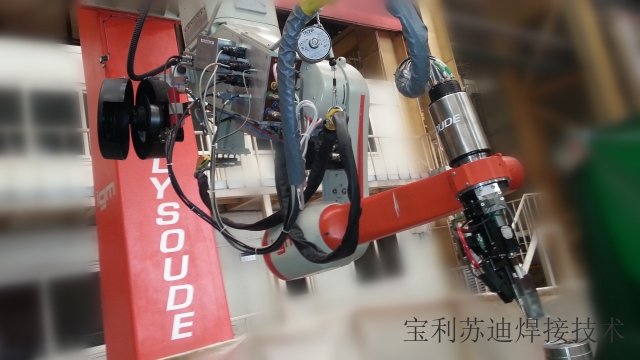
宝利苏迪机器人焊接机头安装于机器人端部,由焊枪,送丝机构,焊枪接口板,线束等构成。甘肃悬吊管托块焊接机器人管板焊机
宝利苏迪管板自动氩弧堆焊机器人,工件通过回转台旋转,回转台承重和直径满足工件焊接,并具有足够的余量。回转台工作平台带中心通孔,中心孔下部为可操作空间,至少保证一个人的操作空间。工作台面配T形槽用于装夹工件。回转工作平台为无极可调,在最大负荷状态下工作时运行平稳。回转工作平台能够承受长时间的辐射热,设备的安全性,稳定性和可靠性能承受连续作业时间不小于30天。水平回转台机械结构设计合理,各部分功能满足买方要求并有足够余量,设备润滑系统设计完善,能保证各转动部件的良好润滑。甘肃悬吊管托块焊接机器人管板焊机




