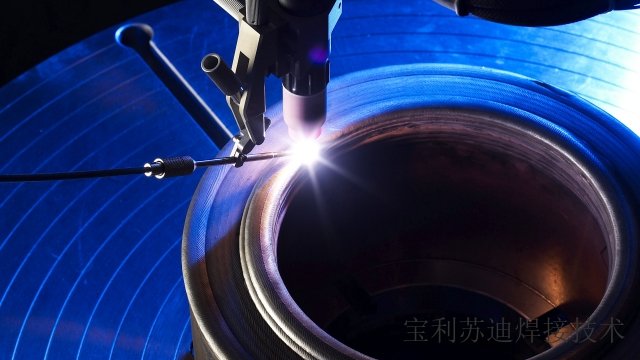
宝利苏迪自动堆焊机器人设备可用于接管内壁堆焊,管子表面堆焊,端面堆焊,该自动堆焊设备采用机器人将TIG焊堆焊机头送至指定位置,采用编程控制或根据待焊工件的形状自主规划堆焊路径,机器人可实现回转、直道及摆动焊接,可实现接管内壁环向规则区域、不规则区域、对称区域及非对称区域的堆焊,可实现接管端面,表面的堆焊及筒体外壁堆焊。自动堆焊机器人的操作及运转空间能满足典型工件操作工位的要求,堆焊机器人活动轴不少于6轴。自动堆焊机器人的控制系统具有安全功能,具有紧急停止,自动模式停止,测试模式停止等。机器人具有监控系统,主要包括堆焊机器人本体和堆焊设备监控。宝利苏迪机器人堆焊设备,可采用编程控制或根据待焊工件形状自主规划焊接路径,实现回转,直道及摆动焊接。江西内孔维修堆焊机头
TIG堆焊电源PC600-3控制系统包括微处理器、6轴控制模块,控制柜,各种控制接口,内置标准程序和操作系统,PC电脑接口和打印机接口等。通过控制面板和与焊接设备相连的PC电脑,整套焊接设备的控制系统能够对所有参数和动作进行编程控制、实时监控和编程范围内的超驰控制。界面显示设备:包括遥控器和PC,其中的显示系统包括电源上的电流电压表,控制柜电脑屏幕显示,遥控器上的液晶屏幕和PC屏幕,可以将焊接过程中的主要参数实时显示:焊接电流,电弧电压,程序标号,执行时间,焊枪位置等。甘肃自动内壁堆焊机头宝利苏迪可提供水平堆焊设备,包括工件旋转或焊炬旋转水平堆焊设备。

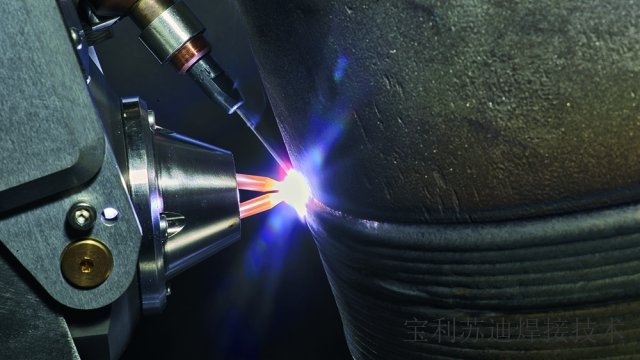
宝利苏迪自动氩弧堆焊设备可用于蒸发器、换热器管板耐腐蚀堆焊。该耐腐蚀堆焊设备,管板堆焊机器人设备包含焊接机头,电源,机器人,操作架,地轨,会转台以及焊缝激光清洗设备。水平回转台可参与机器人编程联动。堆焊机器人采用六轴工业机器人,搭配操作架,能精确定位焊枪位置,实现任意位置的焊接堆焊。该堆焊设备配备了智能焊接系统,熔池检测系统,焊缝清理系统及集中控制系统。焊接方法:双钨极热丝TIG焊。堆焊材料:不锈钢或镍基合金。
TIG焊接电源是自动氩弧堆焊设备的心脏。通过人机界面,Polysoude的多功能,计算机可编程焊接电源可用于精确控制电流强度和运动。PC600-3堆焊焊接电源采用模块化优化设计,性能稳定,抗干扰能力强。焊接主电源,热丝电源,控制系统,气体保护系统采用整体设计,集成于一体,并通过欧盟关于焊接设备的设计、制造、维护及安全性能的检测,保证了应用的稳定性,焊接过程的可重复性及维护的便利性。自动氩弧堆焊电源PC600-3可控制轴:电流轴,机头运动轴,送丝轴,AVC弧长跟踪轴,摆动轴,供电轴,多功能轴等,可实现对焊接所有参数的控制以及对外部设备的联动控制功能。宝利苏迪自动堆焊设备具备断弧,更换钨极等中断操作后的记忆功能,可在中断处继续起弧焊接。

还有其他更复杂的情况,由于工件的尺寸和重量,或者**因为它们的几何形状(例如,实心工件或长方形工件上的钻孔),不可能使工件运动。带无限旋转机构的轨道式焊接机头是宝利苏迪POLYSOUDE专门为焊炬可以在不扭曲电缆/水气线束的情况下旋转而设计的。这些机器可以高度自动化地处理固定工件上的堆焊操作。如传统轨道式机头一样,自动弧长跟踪滑块,摆动滑块,送丝机和摄像组件安装在圆盘上。这些旋转机器除了应用于更困难的情况,如深、小直径的孔或全位置内孔堆焊之外,他们可以堆焊的表面与工件运动的情况相同。宝利苏迪焊接机头和十字滑块安装在操作机上,通过焊接机头在十字滑块上的行走实现平板表面堆焊。河北端面堆焊设备制造商
宝利苏迪提供耐磨堆焊设备、耐腐蚀堆焊设备,防腐堆焊设备、维修堆焊设备,堆焊机器人设备。江西内孔维修堆焊机头
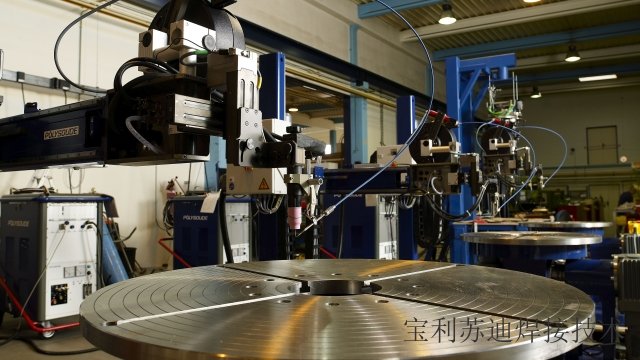
宝利苏迪POLYSOUDE自动氩弧堆焊设备包含水平回转台,满足筒体及法兰的装卡,固定,定位,满足筒体密封面及法兰密封面全部堆焊区域的堆焊需求。水平回转台包含底座,回转驱动装置,工作台,导电装置,润滑系统,控制系统等组件。焊接回转平台需要满足承重要求。底座重心稳定,具有较好的刚性,保证长期使用不变形。回转驱动需具备一定范围内的无极调速功能。工作台由碳素钢焊接成形并热处理后加工,台面有放射状的T形槽,用于安装工件调心调平和固定位置。台面留有中心孔,用于线缆和气管布置通道。防止电缆缠绕,有焊接地线转动滑环机构。江西内孔维修堆焊机头