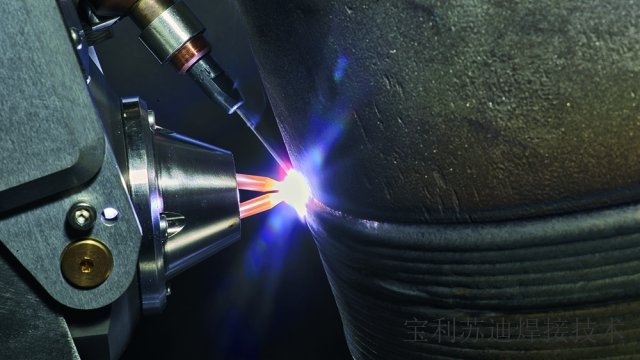
宝利苏迪自动堆焊设备送丝装置包括送丝驱动马达,送丝导管,焊丝盘承载等机构。送丝机可送丝,也可退丝,送丝分手动快速送丝和焊接自动送丝,且焊接过程中的送丝速度通过遥控器可微调。送丝机具有良好的焊丝校直系统,保证焊丝准确无误地送入焊接熔池。热丝机构由热丝电缆、热丝导电杆和热丝导电嘴组成。焊接过程中,该机构将热丝电流传导到焊丝上,加热焊丝,以提高焊丝熔敷效率。设备配套标准丝盘,可使用dia0.8-1.2焊丝。双钨极焊接设备需使用POLYSOUDE宝利苏迪重型送丝机。宝利苏迪堆焊机器人具有监控系统,包括机器人本体和焊机状态监控。安徽内壁堆焊机器人

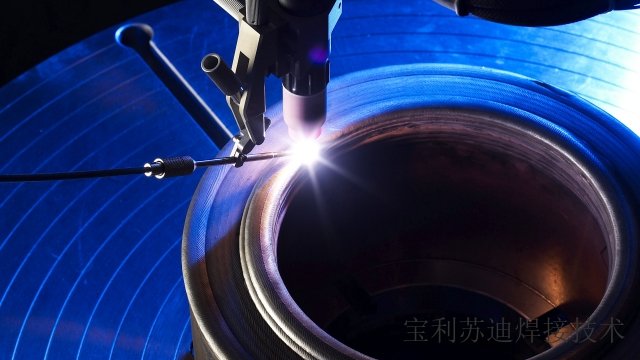
宝利苏迪自动堆焊设备可用于平板堆焊,焊接机头和十字滑块安装在焊接操作机上,通过焊接机头在十字滑块上的行走实现平板表面的堆焊。宝利苏迪自动氩弧堆焊设备可用于接管内壁和拐角堆焊。焊接位置为平焊位置或横焊位置。将工件装卡在变位机工作平台上。焊接机头安装在操作机上,焊接机头固定不动,通过变位机平台的旋转来完成堆焊。堆焊机头配有自动行走机构,通过程序控制,自动进道。工件材质:碳钢,低合金钢,堆焊材料:不锈钢,镍基合金。天津自动阀门堆焊设备制造商宝利苏迪长管内壁堆焊设备由焊接电源,双焊炬双钨极,导向系统,旋转头架,滚轮架等组成。
POLYSOUDE宝利苏迪自动堆焊设备,自动氩弧堆焊设备可用于长管内壁、内孔防腐材料复合层的纵缝堆焊拼接。工件由滚轮架支撑并调整位置,焊枪由穿过管内并拉紧的钢丝绳导向,由机头行走机构推拉进出管子完成纵缝焊接。设备由焊接电源、焊接机头、机头行走及导向机构、钢丝绳拉紧机构、滚轮支撑架、电气控制系统和水冷系统等部分组成。宝利苏迪长管内壁、内孔纵缝堆焊设备可以支撑单钨极焊枪、双钨极焊枪的切换,满足不同工艺的使用需求。宝利苏迪双金属复合管TIG内壁纵缝堆焊拼接设备配备有两种焊接机头,单钨极单丝,双钨极单丝,并由同一个焊接系统控制。
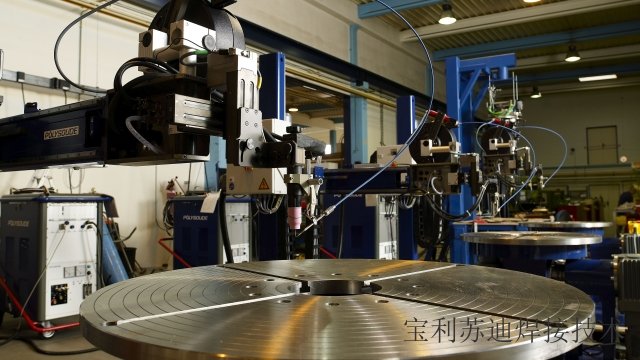
TIG堆焊电源PC600-3控制系统包括微处理器、6轴控制模块,控制柜,各种控制接口,内置标准程序和操作系统,PC电脑接口和打印机接口等。通过控制面板和与焊接设备相连的PC电脑,整套焊接设备的控制系统能够对所有参数和动作进行编程控制、实时监控和编程范围内的超驰控制。界面显示设备:包括遥控器和PC,其中的显示系统包括电源上的电流电压表,控制柜电脑屏幕显示,遥控器上的液晶屏幕和PC屏幕,可以将焊接过程中的主要参数实时显示:焊接电流,电弧电压,程序标号,执行时间,焊枪位置等。宝利苏迪管板堆焊机器人设备采用工件回转的方式进行双钨极堆焊,堆焊材料:不锈钢或镍基合金。

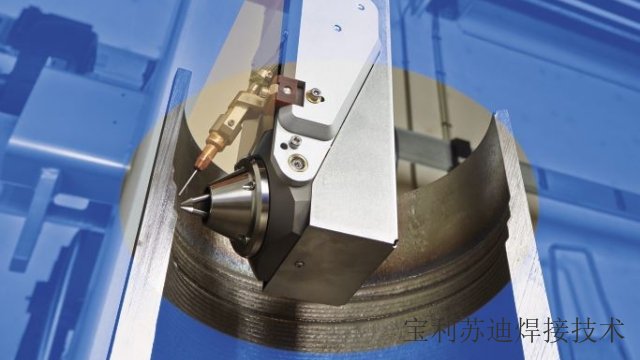
宝利苏迪无限回转堆焊机头SPX的2个滑块分别同时具备AVC和摆动功能。AVC滑块内壁堆焊时用于弧长跟踪,同时用于调整焊接直径。在非焊接时可实现焊枪位置在水平方向上的精细调整,焊接时,通过事先编程预设的电弧电压来精确控制电弧长度,使焊接电弧趋向稳定,保持良好的熔池形态,即实现焊缝高度方向的跟踪。焊接时也可以通过AVC滑块对电弧电压进行微量调整,以改变电弧长度。垂直方向滑块内壁堆焊时可作为堆焊行走轴,用于自动布道。在非焊接时可实现焊枪位置在焊缝垂直方向的精细调整。预先编程设置摆动参数后,可在焊接过程中实现焊枪自动摆动,焊接时也可以通过摆动滑块对焊枪的垂直焊缝方向位置进行微量调整。宝利苏迪自动堆焊设备可节约堆焊操作时间,提高生产能力。稀释率能一直保持在3%以下。辽宁小管内壁堆焊设备生产厂家
宝利苏迪管板耐腐蚀堆焊设备由焊接机头,电源,机器人,操作架,地轨,回转台,焊缝激光清洗设备组成。安徽内壁堆焊机器人
宝利苏迪POLYSOUDE提供两种位置的自动氩弧堆焊设备,水平堆焊或垂直堆焊。无论是水平堆焊或垂直堆焊,宝利苏迪均可根据工件和应用特点,选择合适的工件旋转或者焊枪转动的方式,获得较好堆焊效果。无论是哪种方式,我们均能提供已获认可的自动堆焊设备和配套设备:采用水电分离器设计的氩弧堆焊机头SPX,确保无限旋转,采用宝利苏迪焊接电源控制操作机,滚轮架,变位机的一切动作,并与配套设备实现同步整合。在车间或现场预制过程中,可以进行所有位置的自动堆焊。生产过程具有100%可重复性和可追溯性。安徽内壁堆焊机器人