
我国是能源消费大国和进口大国,在众多的能源消耗中,煤炭是主要能源之一,素有“工业粮食”之称。我国煤炭资源十分丰富,储量居世界前列,2022年,我国生产原煤达到了45亿吨。但是我国煤炭资源分布不均,“北多南少”、“西多东少”,致使我们不得不进行二次运输调配。我国煤炭运输方式主要有铁路、公路、水运三种运...
激光雷达基本参数
- 品牌
- 慧视科技
- 型号
- 可定制
激光雷达企业商机
慧视光电研发的激光雷达是一种高精度的距离、速度等物理量探测设备,其内部16组激光能够进行360°旋转,形成3D点云图,可以远距离高速实现三维环境扫描和目标探测等任务。在夏季预防自然灾害中,激光雷达具有广泛的应用,可用于水文监测、森林火灾监测、地质灾害监测、气象监测等多个方面,有助于提前预警和减轻自然灾害带来的损失。由于夏季多雨,常常会发生洪涝灾害。在水文监测中,激光雷达可以通过扫描地面,测量地表高程、地势和水位等信息,从而提前预警洪水、山洪等自然灾害的发生,有利于相关应急部门采取有效的措施预防和应对自然灾害的发生。再者夏季干旱多风,易发森林火灾。成都慧视光电推出雷视一体机可应用于林业调查。云南自动驾驶激光雷达扫描
激光雷达
T是一个基于 JavaScript 的开源库,用于在 Web 上创建和显示 3D 图形。它提供了许多工具和功能,使得在网页上展示点云数据变得更加简单和高效。使用 T在 Web 端显示点云具有可视化分析、跨平台、高性能渲染、交互式操作和数据共享等诸多好处。它为用户提供了一个直观、灵活且易于访问的平台,帮助他们更好地理解和利用点云数据。慧视光电在激光雷达的开发服务中,会向客户提供的服务,让使用者更好的浏览激光雷达所采集到的D点云图。贵阳大角度测量激光雷达推荐智能激光雷达,雷达避障尽在慧视光电。

激光雷达上车已不是什么稀罕事,作为无人驾驶汽车的“眼睛”,激光雷达的精确度直接影响到自动驾驶汽车的安全和智能化。但激光雷达不是十全十美,有时候面对一个稍微移动的“人形物体”,就很难辨别是人还是不是人,这种混淆极容易酿成事故。行业也在不断探索解决这一局限的方法。一项名为“调频连续波”(FMCW)激光雷达的技术就是对车载激光雷达的完美补充。调频连续波,是通过相位检测的方法来测量反射激光与发射激光之间的频率差,利用该方法从理论上可以实现同时测速、测距。
在采矿车运输场景中,此种方法原理类似,也能达到安全运输管理的目的。成都慧视自研的三维激光雷达HSLi-H20是专为轨道交通监控自主研发的一款激光雷达。具有探测范围宽、分辨率高、响应速度快、点云密集、环境耐受性高等杰出优点,摆脱了现有市场上探测分辨率、扫描速度等技术参数不满足实际需求指标、性价比不高等现实性问题,能够实时获取运输车辆的3D点云图,再通过AI算法自动计算识别扫描出的3D数据,然后在控制中心客户端上以可视化数据呈现,非常适用于车厢检测监控和测量。探测器足激光接收机的部件,也是决定接收机性能的关键因素。

此外,在运输机器人的工作中,例如送餐机器人,激光雷达能够通过不间断的光束扫描获取前方的路况信息,然后根据算法制定行进路线,避开障碍物。物体测量领域,激光雷达能够通过扫描获取物体的三维信息,从而计算出体积、重量等数据。在大多数高速入口,都会对进入高速的货车等进行称重,此时,激光雷达就有大用场,将激光雷达植入车辆检测系统,就能够对进入的车辆进行计数和安全检测,可以实时检测来往车辆的长宽高,并且能够根据算法计算出体积、重量,一旦车辆有超高、超宽、超长、超重等行为,就会发出警报制止其上高速。慧视光电推出雷视一体机!昆明高帧率 激光雷达测距原理
激光雷达的波长短,可以在分子量级上对目标探测。这是微波雷达无能为力的。云南自动驾驶激光雷达扫描
激光雷达具有高分辨率、高精度和较长的探测距离优势。相比其他传感技术,激光雷达可以提供更精确的距离和位置信息,尤其在复杂的环境中,如低光照条件、雨雾天气等。它可以快速地生成高精度的三维点云数据,为自动驾驶汽车和机器人提供环境感知和导航所需的信息。在自动驾驶领域,激光雷达是不可或缺的关键技术之一。它可以实时地感知和识别道路上的车辆、行人、交通标志和障碍物,并生成高精度的地图和路径规划数据。激光雷达的数据可以与其他传感器数据如摄像头图像、雷达数据等进行融合,提供各方位、多角度的环境认知能力,从而实现高级驾驶辅助系统和自动驾驶系统的安全和可靠性。云南自动驾驶激光雷达扫描
与激光雷达相关的文章

贵阳250m激光雷达slam
- 64线激光雷达扫描仪 2024-04-18
- 云南mems激光雷达生产商 2024-04-18
- 重庆机载激光雷达系统 2024-04-18
- 四川ip67防水激光雷达企业 2024-04-17
- 四川汽车激光雷达系统 2024-04-16
- 四川64线激光雷达避障 2024-04-15
- 成都一体式激光雷达测量 2024-04-15
- 贵阳无人机激光雷达slam 2024-04-15
- 云南毫米波激光激光雷达测量 2024-04-14
- 贵阳无人机激光雷达应用 2024-04-13
- 成都mems激光雷达点云 2024-04-13
- 大气激光雷达的应用 2024-04-12
与激光雷达相关的产品



与激光雷达相关的新闻
-
云南高帧率 激光雷达推荐 2024-04-09 01:02:17激光雷达是一种利用激光技术进行测量和感知的高精度传感器。它通过发射激光束并接收其返回的反射光来获取目标物体的距离、速度和位置信息。激光雷达在许多领域都有广泛的应用,例如自动驾驶汽车、机器人导航、环境监测等。激光雷达的工作原理基于激光的时间测量和三角测量原理。它发射短脉冲的激光束,当激光束遇到目标物体...
-
云南固态面阵激光雷达传感器 2024-04-08 11:01:46在智慧停车领域,激光雷达能够辅助进行停车,检测车辆移动状态,控制车辆与物体之间的距离。在建模领域,激光雷达能够通过扫描获取物体的3D点云模型,例如城市建模,激光雷达系统能够提供高密度、高精度的三维数据,建筑物的三维重建比用传统方式更容易,也比手工处理更快,不要立体测量的方式获取高程信息。再例如森林检...
-
贵州轨道检测激光雷达应用 2024-04-08 04:02:38Three.js在Web端显示点云的好处: 可视化分析:点云包含大量的离散点,可能包含空间中的对象、物体或传感器采集的数据。通过使用Three.js,可以以交互式的方式旋转、缩放和平移点云,从不同角度和尺度观察数据,帮助用户更好地理解和分析数据。 跨平台和无需插件:Three.js基...
-
贵州905nm激光雷达测绘 2024-04-08 07:08:25在大气成分测定方面。通过使用激光雷达发出两种不等的光,其中一个波长调到待测物体的吸收线,而另一波长调到线上吸收系数较小的边翼,然后以高重复频率将这两种波长的光交替发射到大气中,此时激光雷达所测到的这两种波长光信号衰减差是待测对象的吸收所致,通过分析便可得到待测对象的浓度分布。在大气中间层金属蒸气层的...
与激光雷达相关的问题
新闻资讯
产品推荐
-
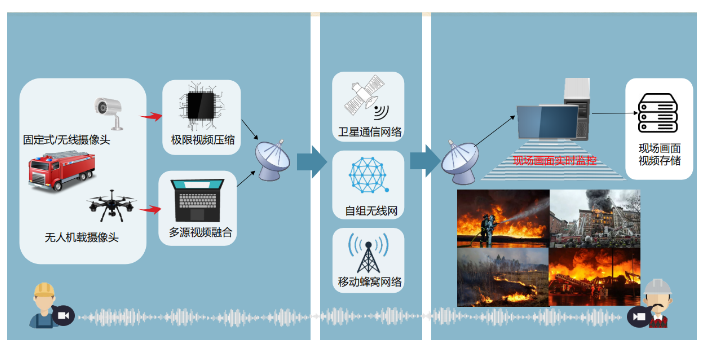
贵州视频压缩与传输高清
2026-07-21 -

重庆2G信号视频压缩与传输不降低画质
2026-07-21 -
视频压缩与传输多路
2026-07-21 -

山西电力运维视频压缩与传输供应商
2026-07-21 -
云南实时视频压缩与传输技术
2026-07-21 -

陕西实时视频压缩与传输无损
2026-07-20 -

甘肃RV1126主板图像识别模块人工智能芯片
2026-07-20 -
云南低带宽视频交互
2026-07-20 -
光纤数据图像处理板分析
2026-07-20