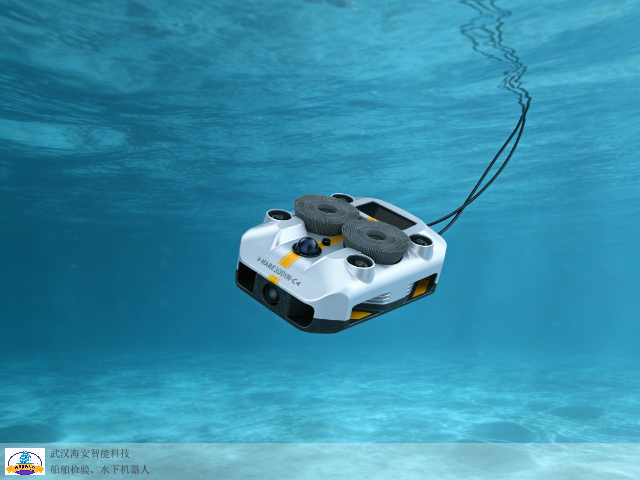
水下环境复杂莫测,尤其是内河航道中,经常漂浮着塑料袋、渔网、绳索等各种杂物。这些杂物一旦缠上推进器,就可能导致机器人动力丧失,甚至酿成水下事故。武汉海安智能的研发团队充分考虑到了这一风险,在机器人主体框架表面靠近防撞网的一侧,滑动设置了过滤网。这层过滤网就像汽车的进气格栅,可以有效阻挡大颗粒杂物进入推进器区域。同时,坚固的防撞网包裹在机器人**,即使与船体发生轻微碰撞,也能保护内部的精密传感器不受损伤。这些看似不起眼的细节设计,恰恰体现了工程化思维的重要性,保障了机器人在恶劣环境下的生存能力。让数据替船说话,连续多年的检测档案,科学预测腐蚀速率和维修时机。湖南现代化水下机器人案例

任何***的企业都离不开实干的技术骨干。在公司信息中,技术负责人张宁的名字多次出现。在2024年南京的首例水下机器人检测任务中,张宁手握遥控手柄,在长江边指挥着这场精密的水下探索。他熟练地操控机器人潜入船底,启动清扫滚刷,将原本模糊的船体结构清晰地呈现在众人面前。在2026年的CCS评审会上,又是张宁重点介绍了公司在ROV设备控制、定位、数据记录管理等方面的具体举措。张宁的形象,**了海安智能的**技术团队——他们不仅是研发室的工程师,更是能在**实操、能解决实际工程难题的实战派。这种“懂技术、懂现场”的复合型人才,是企业****的资产。四川无人遥控水下机器人类型数字孪生愿景,为每艘船建立水下三维模型,实现常态化智能监测。

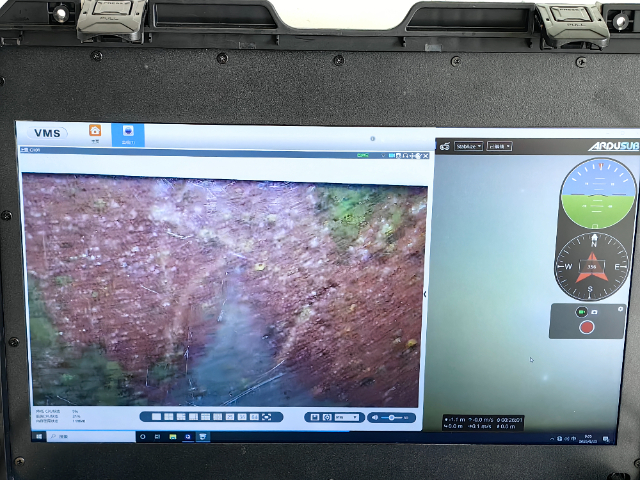
在浑浊的水下环境,照明和摄像是一对矛盾。为了看清物体,必须打光,但强光照射在玻璃与水的介面,极易形成反光,导致画面一片白茫茫。武汉海安智能的研发团队在**中巧妙解决了这一物理难题:他们将安装在密封仓内的摄像部件进行了“倾斜偏移布置”。这意味着摄像头并不是正对着钢化玻璃直拍,而是以一个倾斜的角度拍摄。这样一来,灯光照射在玻璃上产生的镜面反射光,会按照物理定律反射到另一个方向,而不会进入倾斜的摄像头镜头。这个小小的角度调整,相当于给相机戴上了一副天然的“偏光镜”,极大地消除了舱内照明灯光的干扰,让浑浊背景下的目标物体纹理得以清晰呈现。
长江是起点,但不是终点。武汉海安智能的宏伟蓝图,清晰地指向了蔚蓝的海洋。公司总经理李其行明确表示,未来目标是运用水下机器人对海洋钻井船、海洋钻井平台、采油平台、海上风电塔桩等大型海洋装备进行水下检测。相比于内河船舶,海洋装备的检测市场更大,技术要求更高。平台桩腿常年浸泡在高盐、高压、深水的环境中,其结构健康监测需求极为迫切。如果海安智能的机器人能够在这一领域站稳脚跟,将意味着其技术达到了国际先进水平,能够参与全球海洋工程装备检测市场的竞争。产学研合作,携手南航、南工大、中科院沈阳自动化所,打通技术到应用。

目前的海安智能机器人仍以遥控为主(ROV),但未来的发展方向无疑是自主化(AUV)。随着人工智能技术的发展,未来的水下机器人将不再完全依赖人工操控,而是具备更强的自主识别和路径规划能力。武汉海安智能已经开始布局这一领域。通过与高校的合作,他们正在训练机器人的AI模型,让其能够自动识别常见的船体缺陷,如裂缝、涂层脱落、腐蚀坑等。未来的验船师或许只需下达“检测左舷底部”的指令,机器人就能自主规划路径、自动规避障碍、自动识别缺陷,并**终生成一份标注好所有问题的检测报告。白浒山暴雨后的极限试验,证明海安机器人能在浑浊的江水中完成任务。广西附近水下机器人方案
人工智能赋能未来,让机器人学会自动识别裂缝、腐蚀,自主生成检测报告。湖南现代化水下机器人案例
水下检测面临的一个普遍难题是:船底往往覆盖着厚厚的藤壶、贝类和各种海藻。如果不***这些附着物,摄像头拍到的只能是“毛茸茸”的表面,无法看到金属本体和焊缝。武汉海安智能的机器人巧妙地解决了这个问题——它在身体上安装了2支清扫滚刷。当机器人在规划路径中发现某片区域污损严重时,操作员可以启动滚刷电机,高速旋转的刷头就像给船体“洗脸”一样,迅速刮擦、清扫掉表面的附着物。待浑浊的污水散去,清澈的水流替换后,再推进机器人贴近观察。这种“先扫后看”的作业模式,极大地提高了检测的精细度,确保发现的缺陷是真实的结构问题,而不仅*是表面的脏污。湖南现代化水下机器人案例
武汉海安智能科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在湖北省等地区的交通运输中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,武汉海安智能科技供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!