-
山西室内轮式升降巡检机器人设备自检测怎么用
将局部放电监测纳入电力设备的日常维护,是掌握其绝缘状况、安排运维工作的标准实践。局放检测安全巡检机器人配备高灵敏度传感器,能够在变电站和开关柜等场所实现局部放电的精确捕捉。其采用3D激光导航技术,自主规划巡检路径,结合四轮全向驱动设计,适应复杂环境中的灵活移动。机器人搭载的多传感器系统不*能同步采集温湿度、气体浓度和红外热像信息,还能实时...
查看详细 >>06 2026-04 -
北京室内轮式升降巡检机器人安全避障的作用
设备隐患识别功能是廊道巡检机器人提升安全管理的关键环节,合理运用该功能有助于降低设备故障带来的生产风险。机器人搭载高清摄像头及多种传感器,持续采集输煤廊道内的环境和设备状态信息,借助后台大数据分析平台对视频和传感器数据进行智能识别。系统能够自动发现管道破损、人员非法进入、设备温度异常及电力电缆过热等多种隐患,并及时发出警示,标注具体的位置...
查看详细 >>04 2026-04 -
青海怎么样智能巡检系统
噪声监测地面轮式巡检机器人由多个关键组成部分构成,旨在实现对工业现场噪声的高效采集与分析。其主要设备包括高灵敏度的噪声采集装置,能够捕获设备运行时产生的声音信号,并支持音频数据的可视化和存储,便于后续的分析与异常识别。机器人平台集成了可见光与红外双光云台,辅助实现多维度环境监测,形成综合感知体系。四轮全向驱动底盘设计赋予机器人灵活的移动能...
查看详细 >>03 2026-04 -
陕西堆取料机无人值守系统一体化软件
安全急停堆取料机无人值守系统的检测功能涵盖多种安全防护模块,旨在有效管理设备运行风险。系统包含激光扫描检测装置、料位监测系统、斗轮机定位识别系统及安全防护组件。激光扫描装置安装于堆料机悬臂和取料机门架,扇形扫描料堆,快速收集堆形数据,为系统提供准确的作业环境信息。料位检测系统利用雷达传感器监测与物料的距离,协助控制堆料高度和取料深度,保障...
查看详细 >>01 2026-04 -
江苏智能巡检系统有毒气体检测多少钱
红外测温技术是电气房轨道巡检机器人中关键的技术指标之一,直接关系到设备预警和安全管理。机器人搭载的高灵敏度红外热像仪能够实时捕捉设备表面温度分布,精确定位异常热点。该测温模块具备较高的温度分辨率和测量精度,适合110kV及以上电压等级的复杂环境。多点温度采集配合智能算法实现自动报警,当温度超过设定阈值时,系统会触发警报并将异常数据上传至监...
查看详细 >>31 2026-03 -
山西室内轮式升降巡检机器人3D激光导航的作用
红外监测地面轮式巡检机器人通过采用3D激光导航传感器,构建精细的三维场站地图,提升定位与路径规划的精度,满足复杂工业环境的巡检需求。其四轮全向驱动系统支持多种行驶模式,包括原地转向和平移,确保机器人在变电站、换流站及发电和石化场站等场所的灵活移动。配备的高灵敏度红外热像仪能够实时捕捉设备表面温度变化,辅助监测潜在的异常热点。机器人云台集成...
查看详细 >>29 2026-03 -
北京室内轮式升降巡检机器人智能仪表识别工作原理
局部放电检测是电气设备维护中的关键环节,尤其适用于电气房这种设备密集且环境复杂的场所。轨道巡检机器人搭载高灵敏度局部放电传感器,能够持续捕获设备内部微弱放电信号,这些信号通常预示绝缘性能下降或潜在故障。与传统人工巡检相比,机器人实现全天候自动监测,确保对设备健康状况的掌握。局部放电检测不*有助于及时发现绝缘缺陷,还能降低因放电引发的设备击...
查看详细 >>28 2026-03 -
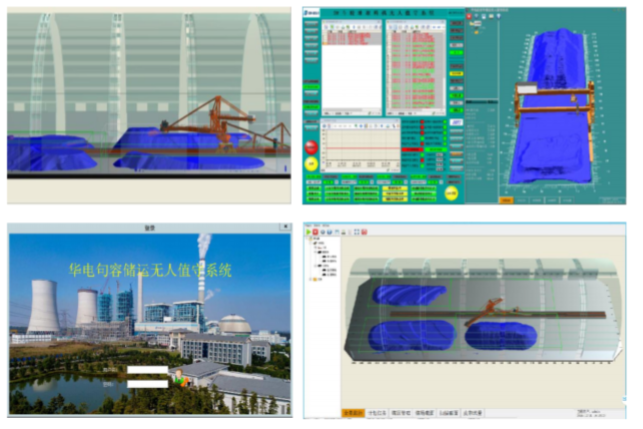
山东数字煤场管控系统堆取料管理参数
燃煤电厂煤场管理常涉及复杂的煤种区分、煤量统计偏差及温度异常监控等难题,这些因素对发电安全和效率产生一定影响。数字煤场管控系统软件通过信息技术与自动化手段,旨在提升煤场管理的智能水平。该系统将煤场划分为多个存煤区域,结合三维立体图形技术,动态呈现各区域的煤量及堆放状况,便于管理人员实时掌握现场情况。系统支持自动测量煤堆体积,数据传输及时且...
查看详细 >>26 2026-03 -
山东数字煤场管控系统发电集团选型
智能化管理是动态数字煤场管控系统的关键所在,它覆盖了煤场的进煤、耗煤及存煤多个环节。系统将煤场划分为若干存煤区域,利用三维图形动态展示各区域的煤量和存储状态。自动化测量功能确保数据及时更新,避免了传统人工盘点带来的误差和延迟。温度监控模块持续跟踪煤堆温度,便于及时发现异常状况,降低自燃风险。系统还能依据实时数据自动制定取煤方案,并通过颜色...
查看详细 >>25 2026-03 -
北京数字煤场管控系统工矿企业开发服务
耗煤数字煤场管控系统由多个模块组成,协同完成煤炭耗用的管理。数据采集模块自动测量煤场各区域的煤量及温度,确保信息的实时性与准确性。数据传输模块通过稳定网络将采集数据上传至数据库,实现统一管理。系统关键处理模块结合存煤情况,自动制定取煤方案,优化耗煤计划,从而提升燃煤利用率。管理界面以三维立体图形动态显示各存煤区的堆放量和取煤状态,辅助操作...
查看详细 >>24 2026-03 -
山东数字煤场管控系统自动盘煤工作原理
设计数字煤场管控系统时,技术架构需兼顾煤场管理的多样需求与系统运行的稳定性。系统采用模块化布局,将进煤、耗煤及存煤管理紧密结合,形成业务流程的完整闭环。进煤模块负责采集卸煤数据及管理存放位置,同时结合煤质暂估支持成本核算。耗煤模块涵盖发电用煤计划与实际耗煤登记,支持掺烧等用煤调整。存煤模块通过定期盘点和温度监测保障库存安全。系统关键技术利...
查看详细 >>23 2026-03 -
河北堆取料机无人值守系统自动取料的功能
无人值守系统的设定和操作流程涵盖从作业计划的制定到自动执行的全过程,确保堆取料机能够依据料堆的实时形态和作业需求精确完成堆料与取料任务。首先,激光扫描仪对料堆进行动态扫描,生成三维几何模型,关键数据如边界、起始点和终止点被传输至PLC控制系统。作业计划包括货种、作业量、堆积角度及堆比重等信息,系统据此确定堆积方式及机械配置。堆料机本地PL...
查看详细 >>22 2026-03