-
山西工业安全监测系统堆取料机
输煤皮带负责工业生产的物料输送,其安全运行关系到生产流程的连续性。工业安全监测系统的远程通信功能为输煤皮带的安全管理提供了创新的解决方案。通过远程通信,管理人员能够在监控中心实时查看输煤皮带的运行状态,及时获取温度、明火等关键数据。系统的远程通信功能允许对前端红外摄像机的焦距和云台运动进行远程操作和控制,确保了监控的灵活性。用户在使用过程...
查看详细 >>30 2026-05 -
上海工业安全监测系统明火识别实时监测
在大型料场中,工业安全监测系统的工作原理主要依赖于多种传感器的综合应用。这些传感器被 安装在料场的关键位置,用于监测温度、气体浓度以及粉尘等环境因素。系统通过无线网络将采集到的数据传输至监控室,便于管理人员实时查看和分析。红外热成像技术是其中的一项主要技术,它能够在不接触物体的情况下,准确测量物体表面的温度变化。这对于防止煤堆自燃等潜在...
查看详细 >>28 2026-05 -
广东堆取料机无人值守系统刮板防撞控制台
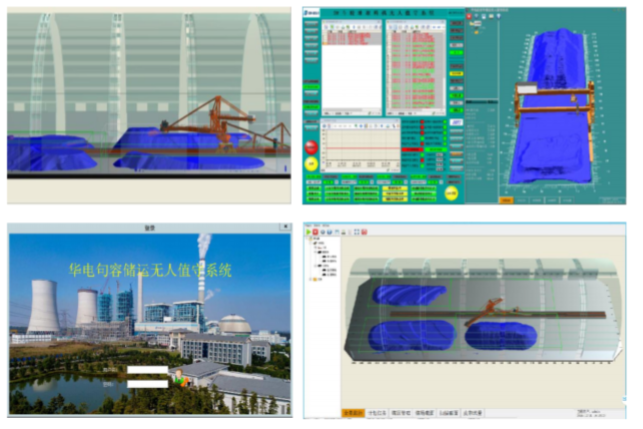
在大型料场堆取料机无人值守系统的运行过程中,数据融合与实时监控起到关键作用。该系统通过多种传感器采集设备状态和环境信息,结合三维激光扫描数据,构建料堆的动态模型。数据处理模块实时分析采集信息,生成控制策略并反馈至PLC控制系统,保证设备动作的准确性与协调性。无线通信网络负责传输视频与控制信号,确保信息传递及时且稳定。视频监控系统覆盖设备关...
查看详细 >>27 2026-05 -
远程诊断怎么样工业安全监测系统
在煤矿生产和火电厂的日常运营中,温度监测是确保设备安全运行的重要环节。挡煤墙罐壁温度工业安全监测系统通过智能化的传感器技术,为企业提供了实时的温度数据采集和分析功能。该系统能够自动生成详细的报表,为管理层提供可靠的数据支持。这种自动化的监测系统不*提高了工作效率,还有效降低了安全隐患。通过实时监测和数据分析,企业能够及时发现潜在的温度异常...
查看详细 >>25 2026-05 -
北京工业安全监测系统堆取料机的优点
在设备密集的室内场所,如机房和继电室,气体安全监测需求较为复杂。诺尚室内轮式升降巡检机器人集成了多种气体传感器,能够检测二氧化碳和六氟化硫等气体的浓度变化。机器人设计了灵活的移动系统和可调节的升降平台,使传感器可以覆盖不同高度的设备区域,实现气体环境采样。采集的数据通过本地监控系统进行处理,并结合云端的数据分析工具,对异常气体浓度进行预判...
查看详细 >>24 2026-05 -
陕西室内轮式升降巡检机器人设备自检测的功能
集成多种先进感知技术的柜面信号识别安全巡检机器人,为电力系统稳定运行提供了新的技术保障。柜面信号识别安全巡检机器人采用高清摄像头结合人工智能图像识别技术,能够自动捕捉开关柜内的指示灯、开关位置及仪表读数,实现数据的非接触式采集。机器人设计模块化,集成红外热像仪和局放检测传感器,支持温度异常和局部放电的同步检测。智能分析系统将采集的信号与预...
查看详细 >>22 2026-05 -
石化行业软件堆取料机无人值守系统
操作控制台在无人值守堆取料系统中扮演关键角色,集成了操纵杆、按钮、选择开关及高清显示器,便于操作人员实时监控设备运行状况。多工位设计支持同时处理多项任务,使得设备状态、故障报警及作业进度信息一目了然。工程师负责系统配置、程序调整及故障排查,保障系统的稳定性。控制台通过高速网络与中控系统及机载PLC保持通信,确保指令准确传达并及时反馈设备状...
查看详细 >>21 2026-05 -
上海廊道巡检机器人实时数据交互工作原理
石化行业对设备巡检的需求较为复杂,促使地面轮式巡检机器人成为重要辅助工具。诺尚的机器人在这一领域表现突出,主要体现在多维环境数据采集与智能数据处理能力。其配备的多种传感器能够监测设备表面温度、气体浓度及噪声,同时支持紫外及局放检测,满足石化行业对安全风险的多层次监控。精确的3D激光导航技术帮助机器人在复杂厂区内高效移动,避免盲区。四轮全向...
查看详细 >>19 2026-05 -
陕西智能巡检系统工矿企业智能分析
设备隐患识别功能是廊道巡检机器人提升安全管理的关键环节,合理运用该功能有助于降低设备故障带来的生产风险。机器人搭载高清摄像头及多种传感器,持续采集输煤廊道内的环境和设备状态信息,借助后台大数据分析平台对视频和传感器数据进行智能识别。系统能够自动发现管道破损、人员非法进入、设备温度异常及电力电缆过热等多种隐患,并及时发出警示,标注具体的位置...
查看详细 >>18 2026-05 -
上海电气房轨道巡检机器人智能识别功能
在料场管理环节,盘煤巡检机器人承担着重要职责,特别是在全封闭储煤场的监测和安全维护中展现出较强的适应性。该设备沿煤棚顶部轨道运行,配备激光扫描仪及红外与可见光双波段测温装置,能够准确获取煤堆的三维空间分布及温度状况。通过及时发现温度异常,机器人有助于降低煤堆过热带来的安全风险,保障储煤环境的稳定。粉尘和气体探测器的使用对作业区域的环境质量...
查看详细 >>16 2026-05 -
广东数字煤场管控系统石化行业开发服务
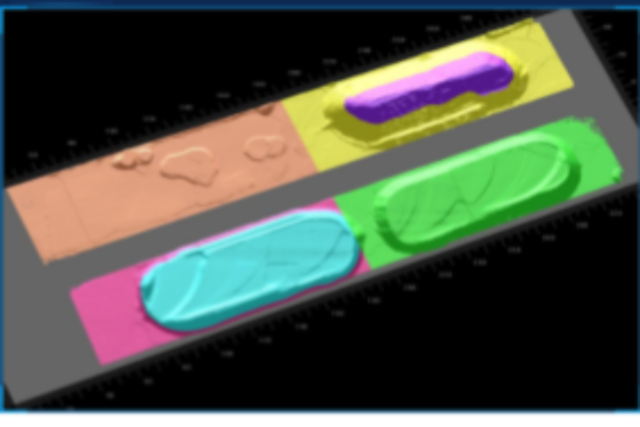
老旧煤场普遍存在煤种混杂、存储不规范和温度监控不及时等问题,这些因素在燃煤电厂及大型料场中增加了管理难度和安全隐患。针对这些复杂状况,数字煤场管控系统方案通过划分存煤区域,采用三维立体图形技术,动态展示各分区煤量和存放状态,提升煤场空间的利用效率。系统集成自动温度测量与传输功能,结合智能碾压翻烧,及时识别煤堆温度异常,辅助风险控制。进煤环...
查看详细 >>15 2026-05 -
山东数据采集智能巡检系统
室内轮式升降巡检机器人在设计中融入了安全避障功能,旨在保障其在复杂室内环境中的稳定运行。机器人搭载了一系列高精度传感器,能够实时检测前方的障碍物,包括设备、人员及临时堆放物。遇到障碍时,系统会立即触发停止机制,避免潜在的碰撞风险。障碍物移除后,机器人会自动恢复巡检任务,同时将相关障碍信息上传至监控基站,方便管理人员掌握现场状况。机器人采用...
查看详细 >>13 2026-05