在医疗耗材生产中,瑕疵检测系统的应用严格保障医疗耗材的洁净度与完整性,助力医疗安全。医疗耗材如注射器、输液管、口罩、手术器械等,对洁净度、完整性要求极高,其表面的污渍、破损、变形、异物混入等瑕疵,会引发医疗风险,威胁患者生命安全。传统人工检测易带来污染,且难以识别微小破损、异物等缺陷,无法满足医疗耗...
瑕疵检测系统基本参数
- 品牌
- 熙岳智能
- 型号
- 瑕疵检测系统
- 适用范围
- 零件瑕疵显微检测系统
- 产地
- 中国南京
- 厂家
- 南京熙岳智能科技有限公司
瑕疵检测系统企业商机
精确性和重复性,由于人眼有物理条件的限制,在精确性上机器有明显的优点。即使人眼依靠放大镜或显微镜来检测产品,机器仍然会更加精确,因为它的精度能够达到千分之一英寸。机器可以以相同的方法一次一次的完成检测工作而不会感到疲倦。与此相反,人眼每次检测产品时都会有细微的不同,即使产品时完全相同的。速度和成本,机器能够更快的检测产品。特别是当检测高速运动的物体时,比如说生产线上,机器能够提高生产效率。由于机器比人快,一台自动检测机器能够承担好几个人的任务。而且机器不需要停顿、不会生病、能够连续工作,所以能够极大的提高生产效率。人眼检测还有一个致命的缺陷,就是情绪带来的主观性,检测结果会随工人心情的好坏产生变化,而机器没有喜怒哀乐,检测的结果自然非常可观可靠。 机器视觉是机器人发展的重要方向,是提高机器人智能化水平的关键因素之一。山东电池瑕疵检测系统产品介绍

企业使用了机器视觉检测设备之后,也是相当于提高了企业在市场上的竞争力,很多有OEM需求的公司,在考察一个企业综合实力的时候,通常会从软实力和硬实力两个方面进行考察,当某个企业的生产工艺落后,设备自动化程度不高,通常也会错失良机,这也是为什么企业也越来越重视机器视觉检测的原因之一。机器视觉检测的应用范围包括了安全系统、表面检测、定位、二维测量比较、二维码识别、二维位置定位、二维物体识别、光学字符识别、机器人视觉、交通监视和驾驶辅助系统、三维测量比较、三维物体定位、三维物体识别、特征检测、完整性检测、颜色检测、一维码识别、印刷检测。由于机器视觉应用范围广,所以越来越多的企业采用机器视觉检测设备代替传统的人工检测。天津榨菜包瑕疵检测系统趋势一台自动视觉检测设备机器能够承担好几个人的任务,而且机器不需要停顿、不会生病、能够连续工作。

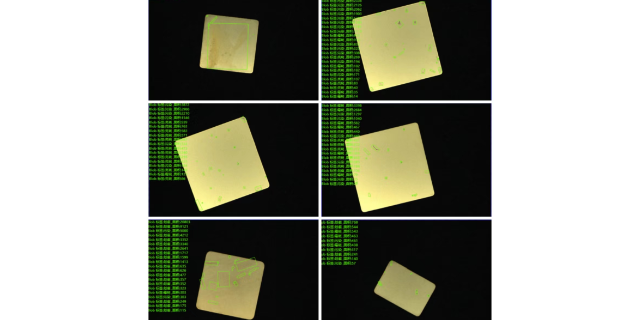
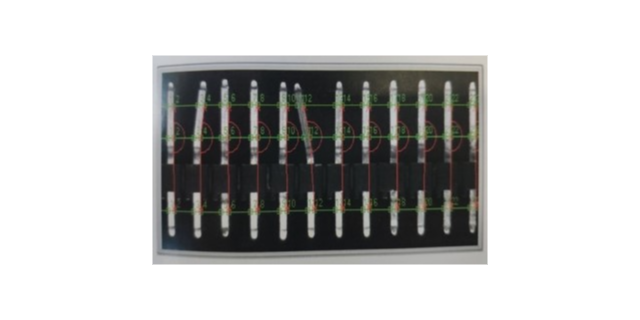
缺陷识别应用方面,缺陷视觉检测系统可实现尺寸、缺损、污渍、中心图案偏移等检测。CNC校正视觉定位引导仪主要对加工产品坐标进行校正,达到CNC加工产品一致性。元器件平整度视觉检测仪专门用于引脚平整度、间隙、引脚宽度、长度等检测。字符视觉检测系统主要对印刷表面字符的对错、缺损、有无、偏移度等进行检测。总之,在工业生产领域,机器视觉检测可以大展拳脚。机器视觉检测系统由光学传感器、相机、镜头、视频帧捕捉器、光源系统、视觉软件组成。光学传感器检测当前的可移动部件的调整。它能触发相机,当它通过光源系统时进行拍照。光源系统,如背光和闪光,能加强性能,降低噪音。视频帧捕捉器是一张电脑卡,能分析被相机捕捉的图像,并通过视觉软件进行进一步的处理。
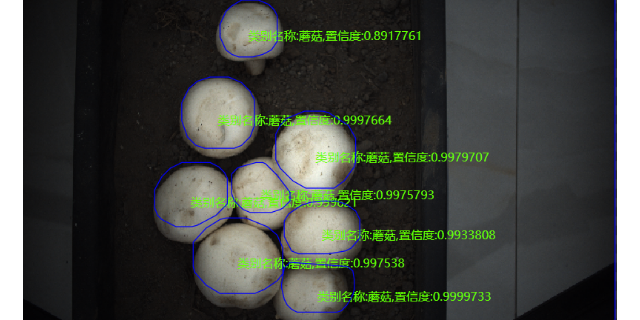
南京熙岳智能科技有限公司通过对各种机械零件的图像采集拍照,根据图像数据判断出零部件的缺陷、划痕、污渍、尺寸、形状、位置、安装定位、校准等,消除或减少次品。 零部件外形尺寸、孔数、孔径大小、孔间距、磨损、等识别与检测。 电子及汽车行业应用:随着电子行业和汽车行业的发展,自动化机器视觉检测设备在行业中的应用必不可少,"低成本、高效率高准确度、简单友好全中文的操作界面"使其应用非常普遍。一,电子产品尺寸、大小、位置、表面磨损、按键错误、字符、标签位置、反装、漏装、错装等检测或测量。 二,机器视觉汽车行业应用。 通过机器视觉检测设备,可以每周7天,每天24小时不间断地生产高质量的产品 ,避免出现产品召回。

机器视觉检测技术有哪些分类?为了适应现今这个发展越来越快的社会,机器视觉检测技术是必不可少的。在一些不合适人类工作的环境场所机器视觉就可以代替人类进行。机器视觉检测技术分类:(1)一般来说,机器视觉检测技术依照检测功用可区别:定位、缺点检测、计数/遗失检测、尺度丈量。(2)机器视觉检测技术依照其装置的载体可分为:在线检测体系和离线检测体系。(3)依照检测技能区别,一般有立体视觉检测技能、斑驳检测技能、尺度丈量技能、OCR技能等。机器视觉检测技术在于消除瑕疵,含糊,碎屑或凹陷等商品缺点,以保证商品的功用和性能至关重要。因而现已被大量用于各大职业的商品缺点检测、尺度检测中。如使用视觉体系能进行商品多种项目的检测,用视觉体系检测电子部件的缺点或偏移的针脚,用视觉体系丈量注射器部件形状或区别颜色来进行检查错误安装等。 在国内外的智能制造领域里,机器视觉也成为新的热点。淮安木材瑕疵检测系统趋势
机器视觉系统能够轻松检验小到人眼无法看到的物品细节特征。山东电池瑕疵检测系统产品介绍
工业视觉应用一般分成四大类,定位、测量、检测和识别,其中测量对光照的稳定性要求比较高,因为光照只要发生10-20%的变化,测量结果将可能偏差出1-2个像素,这不是软件的问题,这是光照变化,导致了图像上边缘位置发生了变化,即使再厉害的软件也解决不了问题,必须从系统设计的角度,排除环境光的干扰,同时要保证主动照明光源的发光稳定性。工件位置的不一致性,一般做测量的项目,无论是离线检测,还是在线检测,只要是全自动化的检测设备,首先做的第一步工作都是要能找到待测目标物。每次待测目标物出现在拍摄视场中时,要能精确知道待测目标物在哪里,即使你使用一些机械夹具等,也不能特别高精度保证待测目标物每次都出现在同一位置的,这就需要用到定位功能,如果定位不准确,可能测量工具出现的位置就不准确,测量结果有时会有较大偏差。 山东电池瑕疵检测系统产品介绍
南京熙岳智能科技有限公司主营品牌有熙岳智能,发展规模团队不断壮大,该公司生产型的公司。公司致力于为客户提供安全、质量有保证的良好产品及服务,是一家有限责任公司(自然)企业。公司拥有专业的技术团队,具有采摘机器人,智能草坪养护机器人,非标设备定制,软件开发系统等多项业务。熙岳智能以创造***产品及服务的理念,打造高指标的服务,引导行业的发展。
与瑕疵检测系统相关的文章

南京传送带跑偏瑕疵检测系统用途
- 四川电池瑕疵检测系统性能 2026-06-16
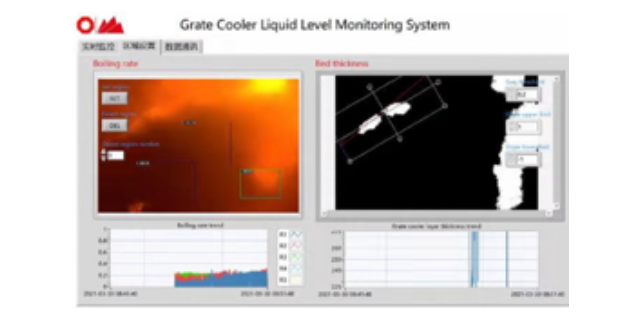
- 连云港篦冷机工况瑕疵检测系统趋势 2026-06-16
- 安徽传送带跑偏瑕疵检测系统性能 2026-06-15
- 山东智能瑕疵检测系统私人定做 2026-06-15
- 嘉兴线扫激光瑕疵检测系统案例 2026-06-15
- 南通冲网瑕疵检测系统 2026-06-15
- 江苏压装机瑕疵检测系统优势 2026-06-15
- 浙江传送带跑偏瑕疵检测系统售价 2026-06-15
- 山东木材瑕疵检测系统性能 2026-06-14
- 扬州智能瑕疵检测系统 2026-06-14
- 四川木材瑕疵检测系统功能 2026-06-14
- 浙江密封盖瑕疵检测系统定制价格 2026-06-14
与瑕疵检测系统相关的产品



与瑕疵检测系统相关的新闻
-
连云港瑕疵检测系统技术参数 2026-06-13 03:01:27在玩具生产中,瑕疵检测系统的应用保障了玩具的安全性与外观品质,适用于塑料玩具、毛绒玩具、电子玩具等各类玩具产品。玩具的表面划痕、破损、毛刺、色差、零件漏装、尖锐边角等瑕疵,会影响玩具的外观与安全性,尤其是针对儿童的玩具,尖锐边角、零件松动等瑕疵会带来安全隐患。传统人工检测效率低下,易漏检尖锐边角、微...
-
无锡电池片阵列排布瑕疵检测系统品牌 2026-06-13 00:11:40瑕疵检测系统为企业提供了全流程、可追溯的质量管控体系,是实现数字化工厂转型的关键数据入口。系统在完成检测的同时,会自动记录每一件产品的检测结果、瑕疵类型、位置坐标、时间戳等海量数据,并上传至云端数据库。这些数据形成了完整的质量追溯链条,一旦出现客户投诉或批次质量问题,技术人员可快速回溯至生产环节,精...
-
四川密封盖瑕疵检测系统价格 2026-06-13 05:01:40瑕疵检测系统在食品包装行业的应用,聚焦于包装合规性与安全性检测,有效避免不合格包装流入市场,保障食品安全与品牌信誉。食品包装的破损、漏气、封口不严、标签歪斜、印刷模糊、生产日期缺失等瑕疵,不*会导致食品污染、变质,还会违反行业合规要求,引发消费者投诉与品牌损失。传统人工检测效率低下,易因疲劳出现漏检...
-
南通铅酸电池瑕疵检测系统优势 2026-06-12 10:01:14瑕疵检测系统在玻璃制品生产中的应用,有效解决了玻璃制品瑕疵影响外观与安全性的问题,适用于平板玻璃、玻璃瓶、玻璃器皿等各类玻璃产品。玻璃制品的划痕、崩边、结石、气泡、裂纹等瑕疵,不*影响产品外观品相,还会降低玻璃的强度,存在安全隐患,传统人工检测难以识别微小气泡、内部结石等缺陷,且易因操作不当导致玻璃...
与瑕疵检测系统相关的问题
与瑕疵检测系统相关的标签