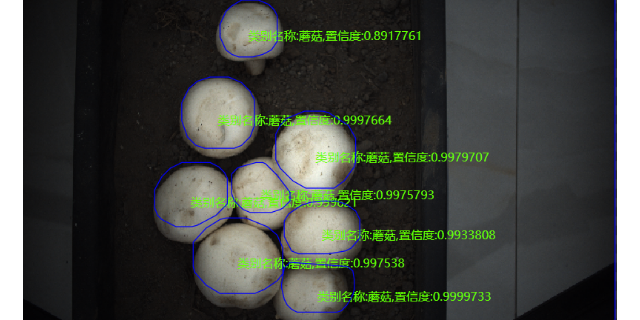
苹果采摘机器人是智慧农业解决果园用工难题的装备,针对我国苹果主产区丘陵地形复杂、人工采摘效率低、成本占比高的痛点,已形成从单臂到多臂协同的技术谱系。其**架构由多模态视觉感知、多自由度机械臂、仿生末端执行器与移动底盘构成,视觉系统采用深度学习算法,在 0.015 秒内完成果实识别与成熟度判断,可有效...
智能采摘机器人基本参数
- 品牌
- 熙岳智能
- 型号
- 智能采摘机器人
- 加工定制
- 是
智能采摘机器人企业商机
采摘机器人的发展,正在深刻重塑农业的生产模式、劳动力结构和乡村经济形态。从积极层面看,它是对全球范围内农业劳动力老龄化、短缺问题的有力回应。在日本、欧洲等发达地区,农业从业者平均年龄已超过60岁,繁重的采摘工作难以为继。机器人的引入能保障农业生产不因人力匮乏而萎缩,维持粮食安全和本土农业的可持续性。它也将劳动者从重复、劳累的体力工作中解放出来,转向更具技术性的设备管理、维护和数据分析岗位,推动“农民”向“农业技术员”的职业转型。然而,这一转型也伴随着阵痛与社会考量。大规模自动化可能导致短期内低技能农业工作岗位的减少,对依赖季节性务工收入的群体造成冲击。因此,其推广需要与劳动力再培训和社会政策调整相协同。更深层次的影响在于,它将加速农业向“精细农业”和“数据驱动农业”的演进。每一台采摘机器人都是一个移动的数据采集平台,在作业的同时,能记录每棵植株的果实数量、大小、预估产量甚至健康状况,生成极高精度的果园地图。这些海量数据为优化水肥管理、预测产量、早期发现病害提供了前所未有的洞察,使农业生产从经验主导的粗放模式,彻底转向以数据和人工智能为关键的精细化、智能化管理。熙岳智能智能采摘机器人在石榴采摘中,能避免采摘过程中果皮破裂,保持果实完整。广东一种智能采摘机器人解决方案
智能采摘机器人
在完全受控的温室和垂直农场中,采摘机器人已成为“植物工厂”的关键组成部分。它们通常集成在多层栽培架的轨道系统上,实现三维空间移动。通过环境传感器与作物生长数字模型的实时交互,机器人能精细预测每株作物的比较好采收期。对于叶菜类,它们使用水切割或激光切割技术,保证切口平整不易腐烂;对于果菜类,则采用自适应夹持器。新加坡的Sky Greens、日本的Spread等垂直农场已实现从播种、移栽、施肥到采收的全流程机器人化,其中采摘环节完全由机器视觉引导的机械臂完成。这种系统使单位面积产量达到传统田间的100倍以上,且实现全年无休生产,为都市农业提供了可靠解决方案。自动化智能采摘机器人定制价格熙岳智能智能采摘机器人的软件系统具有自主学习能力,可不断优化采摘策略。

葡萄、猕猴桃等藤本作物的机械化采收需要特殊解决方案。法国研发的葡萄采摘机器人采用仿生触觉技术:机械臂末端配置压电纤维传感器,在接触果梗时模拟人手触感,通过微振动寻找比较好施力点。为适应不同葡萄品种,机器人内置100种采摘模式数据库,可根据果梗木质化程度自动调整扭力参数。在采摘同时,机器人还执行多项质量检测:通过微型近红外探头随机抽样测量糖酸比,利用高分辨率相机识别霉变颗粒。澳大利亚的猕猴桃采摘系统则创新性采用“包围式”采摘头:六组柔性指状结构从四周包裹果实,通过应变传感器实时监控包裹压力,在保证不挤压果实的前提下完成果柄切割。这些专业设备使藤本作物的机械化采收品质达到市场要求。
引入番茄采摘机器人是一项重大的资本投资,其经济性分析至关重要。初期成本主要包括机器人硬件本身、系统集成、软件授权以及维护保养费用。然而,综合账本需计算长期收益:直接节省日益昂贵且不稳定的季节性人工成本;通过降低采摘损伤率(可控制在5%以下,优于人工)提升质量果率,增加销售收入;减少对人工宿舍、管理等间接开支。在劳动力成本高昂的发达国家,投资回收期已缩短至3-5年。此外,机器人提供的精细数据还能间接帮助降低水肥药成本,优化资源利用。随着规模化生产和技术成熟度提升,机器人的单价和运营成本预计将持续下降,使其在全球更多市场成为经济可行的选择。熙岳智能智能采摘机器人的推广应用,为农业现代化发展提供了有力支撑。

识别之后,采摘本身是一项对精细度要求极高的机械艺术。机器人的“手”——末端执行器,其设计直接关系到采摘的成功率与果实的商品价值。针对番茄这种皮薄多汁的浆果,执行器必须兼具力度精细与动作柔和。常见的设计包括带有柔软衬垫的仿生夹爪,能自适应包裹果实形状,通过传感器反馈实现毫牛顿级的力度控制,在紧握与损伤间找到完美平衡。另一种主流方案是采用吸盘式执行器,利用负压吸附住果实表面,尤其适合从复杂缝隙中提取番茄。无论哪种方式,通常都配合一个精密的旋转或剪切机构,模仿人类手腕的“捻转”动作,干净利落地分离果柄,避免生拉硬拽对藤蔓造成伤害。这只“灵巧之手”在几秒内完成的,是力学、材料学与仿生学协同的结晶。熙岳智能智能采摘机器人在山楂采摘中,能分离果实与枝叶,提升采摘纯度。山东小番茄智能采摘机器人性能
熙岳智能智能采摘机器人可与无人机协同作业,实现果园的管理。广东一种智能采摘机器人解决方案
采摘机器人的涟漪效应正沿着产业链扩散。上游催生新的零部件产业:德国某小镇专门生产机器人的抗露水镜头涂层,成为隐形企业。采收时间精细控制使冷链物流效率提升:机器人预约卡车在采摘完成30分钟到场,农产品从离开植株到进入预冷车间不超过45分钟。消费端也因此受益:超市可获得每颗苹果的采收时间、糖度曲线甚至日照记录,消费者扫码便知盘中餐的“数字生长日记”。更重要性的是订单农业新模式,机器人按日订单量进行差分采收,实现从田间到餐桌的零库存管理。整个农产品供应链正在从“推式”向“拉式”转型。广东一种智能采摘机器人解决方案
与智能采摘机器人相关的文章

上海多功能智能采摘机器人技术参数
- 江西供应智能采摘机器人产品介绍 2026-06-04
- 江西智能智能采摘机器人价格 2026-06-04
- 浙江什么是智能采摘机器人用途 2026-06-04
- 广东AI智能采摘机器人优势 2026-06-04
- 北京智能智能采摘机器人价格低 2026-06-03
- 河南多功能智能采摘机器人品牌 2026-06-03
- 安徽一种智能采摘机器人按需定制 2026-06-03
- 浙江草莓智能采摘机器人价格低 2026-06-03
- 江西小番茄智能采摘机器人定制 2026-06-03
- 山东智能智能采摘机器人用途 2026-06-03
- 江西供应智能采摘机器人品牌 2026-06-03
- 江苏苹果智能采摘机器人品牌 2026-06-02
与智能采摘机器人相关的产品



与智能采摘机器人相关的新闻
-
天津制造智能采摘机器人性能 2026-06-02 11:01:19成本高企是制约苹果智能采摘机器人规模化普及的**瓶颈,未来行业将通过 “重要部件国产化 + 硬件配置优化 + 机型分级设计” 三大路径,推动设备成本下降至中小种植户可接受范围。在**部件层面,3D 双目摄像头、高精度伺服电机、AI 芯片等关键组件的国产化替代将加速推进 —— 目前进口 3D 摄像头单...
-
吉林智能采摘机器人定制 2026-06-02 03:01:29苹果采摘机器人是采摘机器人中技术较为成熟、应用较为广的品类,专门针对苹果种植场景设计,有效替代了苹果采摘机械化率低、人工成本高、安全风险大的痛点。我国是全球比较大的苹果生产国,产量占世界总产量的50%以上,但苹果采摘环节的机械化率*为2.7%,采摘成本占总生产成本的30%至40%,传统“梯子+篮子”...
-
福建品质智能采摘机器人优势 2026-06-01 07:01:25未来,采摘机器人将朝着更智能、更高效、更具适配性、成本更低的方向发展,逐步实现无人化、规模化作业,成为智慧农业的装备。在智能化方面,采摘机器人将融合人工智能、大语言模型等技术,具备更强的自主决策、自适应调整和自然语言交互能力,能够自主应对复杂的作业环境,减少人工干预;在效率方面,将通过优化机械结构、...
-
吉林农业智能采摘机器人按需定制 2026-06-01 09:01:28苹果采摘机器人是采摘机器人中技术较为成熟、应用较为广的品类,专门针对苹果种植场景设计,有效替代了苹果采摘机械化率低、人工成本高、安全风险大的痛点。我国是全球比较大的苹果生产国,产量占世界总产量的50%以上,但苹果采摘环节的机械化率*为2.7%,采摘成本占总生产成本的30%至40%,传统“梯子+篮子”...
与智能采摘机器人相关的问题
与智能采摘机器人相关的标签