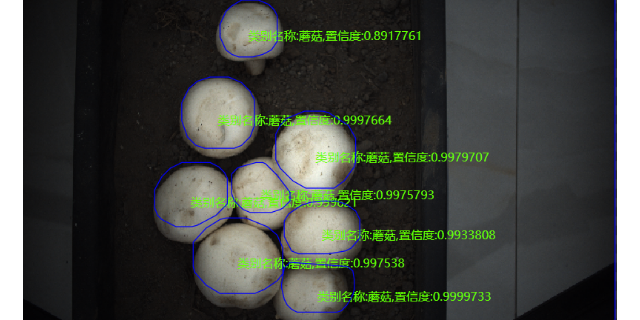
苹果采摘机器人是智慧农业解决果园用工难题的装备,针对我国苹果主产区丘陵地形复杂、人工采摘效率低、成本占比高的痛点,已形成从单臂到多臂协同的技术谱系。其**架构由多模态视觉感知、多自由度机械臂、仿生末端执行器与移动底盘构成,视觉系统采用深度学习算法,在 0.015 秒内完成果实识别与成熟度判断,可有效...
智能采摘机器人基本参数
- 品牌
- 熙岳智能
- 型号
- 智能采摘机器人
- 加工定制
- 是
智能采摘机器人企业商机
新一代采摘机器人正朝向人机共生方向发展。通过5G网络实现云端大脑与边缘计算的协同,操作人员可远程监控多机器人集群,在紧急情况下接管控制权。增强现实(AR)界面叠加实时果树生理数据,辅助人工完成精细化修剪决策。在葡萄采摘场景中,机器人执行粗定位后,由人工完成**终品质确认,形成"粗采精选"的协作模式。智能化升级方面,数字孪生技术被用于构建虚拟果园,通过物理引擎模拟不同气候条件下的果树生长,预演采摘策略效果。迁移学习框架使机器人能快速适应新品种作业,在樱桃番茄与蓝莓的跨品种任务中,识别准确率在200次迭代内达到85%。未来,结合神经拟态计算芯片,将实现更低功耗的脉冲神经网络决策,推动采摘机器人向完全自主进化。一些智能采摘机器人具备自动清洁功能,保持自身清洁以提高作业性能。海南猕猴挑智能采摘机器人售价
智能采摘机器人
垂直农场催生出三维空间作业机器人。以叶菜类生产为例,机器人采用六足结构适应多层钢架,其足端配备力传感器,在狭窄通道中仍能保持稳定。视觉系统采用结构光三维扫描,可识别不同生长阶段的植株形态,自动调整采摘高度。在光照调控方面,机器人与LED矩阵协同工作。当检测到某层生菜生长迟缓,自动调整该区域光配方,并同步记录数据至作物数据库。新加坡某垂直农场通过该系统,使单位面积叶菜产量达到传统农场的8倍,水耗降低90%。更前沿的是机器人引导的"光配方种植"模式。通过机械臂精细调节每株作物的受光角度,配合光谱传感器实时反馈,实现定制化光照方案。这种模式下,樱桃番茄的糖度分布均匀度提升55%,商品价值明显增加。海南猕猴挑智能采摘机器人售价智能采摘机器人可根据果实的大小、形状和颜色,自动调整采摘力度和方式。

在现代规模化果园中,采摘机器人已形成多层级协同作业体系。以柑橘类果园为例,配备LiDAR与多光谱相机的机器人集群,通过边缘计算节点实现任务动态分配。当某区域果实成熟度达到阈值时,协调者机器人立即调度3-5台作业单元组成临时采摘分队,其通讯时延低于200ms。机械臂采用变构型设计,针对树冠**稀疏果实采用长臂粗操作,内部密集区则切换为7自由度柔性臂。末端执行器集成电容式接近传感器,可识别果实与枝叶的介电常数差异,避免误伤嫩芽。在实际作业中,这种系统使柑橘采摘效率达到人工的2.8倍,损伤率控制在3%以内。更值得关注的是物联网技术的深度整合,每颗采摘的果实都带有RFID标签,记录采摘时间、位置、成熟度等数据。通过区块链技术上传至溯源平台,为后续的物流、销售提供完整数据链。据加州某柑橘农场实测,采用该系统后,库存周转率提升45%,溢价果品比例增加22%。
番茄采摘机器人仍面临三重挑战。首先是复杂环境下的泛化能力:雨滴干扰、叶片遮挡、多品种混栽等情况会导致识别率骤降。某田间试验显示,在强日照条件下,红色塑料标识物的误检率高达12%。其次是末端执行器的生物相容性:现有硅胶材料在连续作业8小时后会产生静电吸附,导致果皮损伤率上升。是能源供给难题:田间移动充电方案尚未成熟,电池续航限制单机作业面积。伦理维度上,机器人替代人工引发的社会争议持续发酵。欧洲某调研显示,76%的农场工人对自动化技术持消极态度。农业经济学家警告,采摘环节的自动化可能导致产业链前端出现就业真空,需要政策制定者提前设计转岗培训机制。此外,机器人作业产生的电磁辐射对传粉昆虫的影响,正在引发环境科学家的持续关注。智能采摘机器人的推广应用,有望推动农业向智能化、规模化方向加速发展。

针对不同果园的复杂地形,采摘机器人发展出多样化的环境适应策略。在山地果园,机器人采用履带式底盘配合陀螺仪稳定系统,可在30°坡度地面稳定行进。对于密集型种植模式,搭载可伸缩机械臂的机器人能穿越狭窄行距,其碳纤维支架可承受200公斤载荷。在应对光照变化方面,视觉系统具备自适应曝光调节功能,即便在晨曦或黄昏光线条件下,仍能保持92%以上的识别准确率。欧洲某农业科技公司开发的机器人更集成气象监测模块,遇降雨自动启动防水模式,调整采摘力度防止果实碰伤。这些技术突破使机器人既适用于规模化种植的平原果园,也能在梯田、丘陵等非常规地形高效作业。智能采摘机器人的移动底盘具备良好的越野性能,适应不同土质的农田。浙江梨智能采摘机器人价格低
智能采摘机器人能够与农场的管理系统无缝对接,实现数据实时共享。海南猕猴挑智能采摘机器人售价
采摘机器人是融合多学科技术的精密系统,其研发需攻克"感知-决策-执行"三大技术链。在感知层,多模态传感器协同作业:RGB-D相机构建三维环境模型,多光谱成像仪识别果实成熟度,激光雷达扫描枝叶密度。决策算法则依赖深度学习网络,通过数万张田间图像训练出的AI模型,可实时判断目标果实的空间坐标、成熟度及采摘优先级。执行机构通常采用6-7自由度机械臂,末端搭载仿生夹爪或真空吸嘴,模仿人类指尖的柔性抓取力,避免损伤果实表皮。例如,荷兰研发的番茄采摘机器人,其末端执行器内置压力传感器,能根据果实硬度自动调节夹持力度,使破损率控制在3%以内。海南猕猴挑智能采摘机器人售价
与智能采摘机器人相关的文章

上海多功能智能采摘机器人技术参数
- 江西供应智能采摘机器人产品介绍 2026-06-04
- 江西智能智能采摘机器人价格 2026-06-04
- 浙江什么是智能采摘机器人用途 2026-06-04
- 广东AI智能采摘机器人优势 2026-06-04
- 北京智能智能采摘机器人价格低 2026-06-03
- 河南多功能智能采摘机器人品牌 2026-06-03
- 安徽一种智能采摘机器人按需定制 2026-06-03
- 浙江草莓智能采摘机器人价格低 2026-06-03
- 江西小番茄智能采摘机器人定制 2026-06-03
- 山东智能智能采摘机器人用途 2026-06-03
- 江西供应智能采摘机器人品牌 2026-06-03
- 江苏苹果智能采摘机器人品牌 2026-06-02
与智能采摘机器人相关的产品

与智能采摘机器人相关的新闻
-
天津制造智能采摘机器人性能 2026-06-02 11:01:19成本高企是制约苹果智能采摘机器人规模化普及的**瓶颈,未来行业将通过 “重要部件国产化 + 硬件配置优化 + 机型分级设计” 三大路径,推动设备成本下降至中小种植户可接受范围。在**部件层面,3D 双目摄像头、高精度伺服电机、AI 芯片等关键组件的国产化替代将加速推进 —— 目前进口 3D 摄像头单...
-
吉林智能采摘机器人定制 2026-06-02 03:01:29苹果采摘机器人是采摘机器人中技术较为成熟、应用较为广的品类,专门针对苹果种植场景设计,有效替代了苹果采摘机械化率低、人工成本高、安全风险大的痛点。我国是全球比较大的苹果生产国,产量占世界总产量的50%以上,但苹果采摘环节的机械化率*为2.7%,采摘成本占总生产成本的30%至40%,传统“梯子+篮子”...
-
福建品质智能采摘机器人优势 2026-06-01 07:01:25未来,采摘机器人将朝着更智能、更高效、更具适配性、成本更低的方向发展,逐步实现无人化、规模化作业,成为智慧农业的装备。在智能化方面,采摘机器人将融合人工智能、大语言模型等技术,具备更强的自主决策、自适应调整和自然语言交互能力,能够自主应对复杂的作业环境,减少人工干预;在效率方面,将通过优化机械结构、...
-
吉林农业智能采摘机器人按需定制 2026-06-01 09:01:28苹果采摘机器人是采摘机器人中技术较为成熟、应用较为广的品类,专门针对苹果种植场景设计,有效替代了苹果采摘机械化率低、人工成本高、安全风险大的痛点。我国是全球比较大的苹果生产国,产量占世界总产量的50%以上,但苹果采摘环节的机械化率*为2.7%,采摘成本占总生产成本的30%至40%,传统“梯子+篮子”...
与智能采摘机器人相关的问题
与智能采摘机器人相关的标签