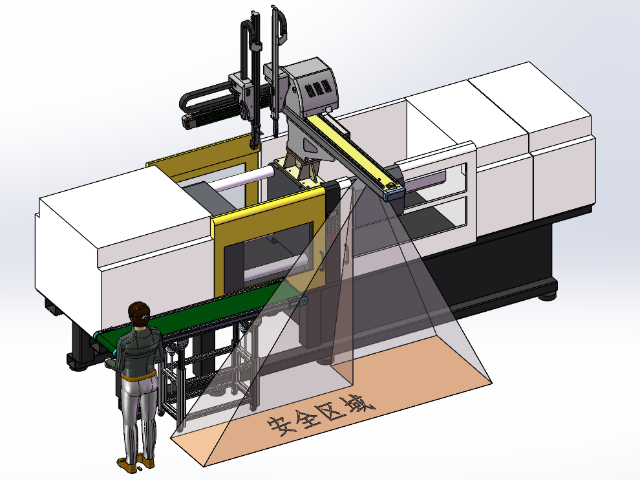
立体空间防护传感器在纸箱码垛机器人中用于检测码垛层高。码垛机器人将输送线上的纸箱逐层堆叠在托盘上。每层码放完成后,传感器测量当前堆垛顶部与机器人抓头之间的距离。该距离值被用于确定下一层纸箱的放置高度。随着堆垛层数增加,距离数值逐渐减小。当距离数值小到设定阈值时,表示托盘上的纸箱已经达到预定层数。机器人停止码垛动作,发出满垛信号,由叉车将托盘运走。传感器采用超声波测距方式,对纸箱表面的颜色和图案不敏感。即使纸箱表面印刷有大面积深色图案或反光覆膜,超声波仍能可靠反射。传感器的探测波束角度为15度,在2米距离处覆盖直径约0.5米的圆形区域。该覆盖范围能够适应不同尺寸的纸箱,不需要频繁调整安装位置。传感器外壳为聚对苯二甲酸丁二醇酯材料,阻燃等级V0。接线方式为四线制,包含电源正负极、输出信号线和屏蔽地线。在纸箱粉尘较多的环境中,传感器每四周进行一次清洁。使用软毛刷***超声波发射面的积尘,避免使用有机溶剂擦拭,防止材料表面损伤。适配注塑机械手,人员误入下行区域时立即暂停设备。立体防护传感器方案设计
在AI大模型防撞传感器中,传感器需要采集人体图像以进行识别。大德恒通高度重视数据安全,在产品设计之初就遵循隐私保护原则。所有图像数据在设备本地进行处理和识别,不上传云端,不存储原始视频流。传感器内置的高算力AI芯片完成全部推理计算,无需额外算力设备,也避免了数据在网络传输过程中被截获的风险。个人数据(如人体轮廓、姿态等)加密存储于设备内部,*用于实时安全判断,不做其他用途。对于注重数据合规的企业而言,这种端侧计算、本地处理的设计,既满足了安全防护需求,也符合数据保护相关法规的要求。广东电子安全围栏防护传感器技术指导物流仓储场景部署,AGV小车与人员混行区域主动防撞。

立体空间防护传感器在铸件清理打磨工作站中用于检测砂轮磨损情况。打磨机器人末端装有砂轮,对铸件表面进行打磨。砂轮在使用过程中直径逐渐减小,影响打磨位置精度。传感器安装在机器人臂上靠近砂轮的位置,测量砂轮外缘与参考点之间的距离。初始状态下砂轮直径为200毫米,传感器测量距离为50毫米。砂轮磨损后直径减小,传感器测量距离增加。当测量距离增加到55毫米时,控制系统自动补偿机器人轨迹,使砂轮与铸件的接触位置保持不变。当测量距离增加到60毫米时,控制系统判断砂轮已到达使用寿命,发出更换提示。机器人停止打磨动作,移动到工具更换站等待操作人员更换砂轮。传感器采用激光位移原理,分辨率为0.01毫米。激光光斑尺寸为0.5毫米×1毫米,能够精确照射砂轮外缘。打磨过程中产生的粉尘会沉降在传感器窗口上,传感器的气幕防尘系统使用0.2兆帕压缩空气持续吹扫窗口。防尘系统与机器人动作联动,机器人打磨时气幕开启,机器人待机时气幕关闭以节约压缩空气。传感器外壳防护等级IP65,供电为24伏直流。输出信号为4至20毫安电流,采用三线制连接方式。
很多工厂已经部署了PLC、DCS、工业总线等控制系统,新增安全设备必须能够与现有系统顺畅通信。大德恒通防撞传感器支持Ethernet通信,并提供了多组输入输出接口(如3组输出、手动/自动复位、7组输入等),可灵活匹配不同品牌的控制器。传感器与设备之间可以实现互控:一方面,传感器检测到人员入侵后输出停止信号;另一方面,设备也可根据运行状态切换传感器的防护区域场景。这种双向交互能力,使得防撞传感器不是孤立的“安全孤岛”,而是整厂智能化安全网络中的一个智能节点。在多台机器人协同作业、整厂自动化生产线等复杂场景中,多台防撞传感器可同时工作且互不干扰,共同构建一个完整的人员检测与设备联锁体系。支持轮廓识别、距离警告、空间判断等多种检测算法融合判断。

立体空间防护传感器需要适应工业现场的各种环境条件。焊接车间存在强弧光,光线中包含紫外线和红外线成分。铸造车间有粉尘悬浮,颗粒大小从微米级到毫米级不等。室外安装的设备要经受阳光直射和雨雪天气。传感器在设计时采用多种技术手段抵抗环境干扰。抗强光方面,发射光波经过调制,接收端只对特定频率的信号进行放大。环境中的静态光强被滤波电路滤除。抗粉尘方面,传感器窗口使用疏水疏油涂层,粉尘不易附着。同时窗口周围设计有气幕接口,通入压缩空气后形成气帘,吹走飘落的粉尘。抗温度变化方面,传感器内部有温度补偿电路。温度传感器的数值被用于修正探测距离的计算公式。不同温度下测得的同一目标距离保持一致。传感器外壳材料添加抗紫外线成分,长期室外使用不出现变色或开裂。接线盒内放置干燥剂包,吸收昼夜温差产生的凝露。多目标同时识别与跟踪,复杂动态场景依然可靠。河北空间防护传感器智能调节
支持多组IO输入输出,与PLC实现双向信号交互。立体防护传感器方案设计
注塑车间机械手从模具中取出注塑件后,需要将注塑件放入输送带或料箱。立体空间防护传感器安装在机械手夹具的侧面,检测注塑件是否在夹具上脱落。机械手开模后进入模具内部取件,夹具闭合夹住注塑件。在机械手退出模具的过程中,传感器持续监测夹具与注塑件之间的相对位置。注塑件从夹具上滑落时,传感器探测到的距离突然增大。控制系统收到距离变化信号后,停止机械手后续动作。机械手保持当前姿态等待人工处理。这种检测避免了空夹具继续进行放置动作,防止后续工序出现空料情况。传感器也能检测模具内是否有残留的注塑件。机械手取件完成后,传感器在模具闭合前快速扫描模具型腔。型腔内若有残留物,反射信号特征与空腔不同,传感器输出禁止合模信号。注塑机顶针保持顶出状态,等待操作人员清理。传感器的响应时间设定为10毫秒,与机械手动作速度匹配。安装时传感器探头与夹具边缘保持齐平,避免探头被工件碰撞。立体防护传感器方案设计
深圳市大德恒通科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在广东省等地区的机械及行业设备中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,深圳市大德恒通科技供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!