立体空间防护传感器在自动螺丝锁付机中用于检测螺丝是否到位。螺丝由振动盘排列后通过气管吹送到锁付头的夹爪位置。传感器安装在夹爪两侧,检测螺丝是否进入夹爪。螺丝到达时遮断传感器光路,输出到位信号。锁付头下降,电批旋转将螺丝拧入工件。若传感器未检测到螺丝,锁付头保持在上位,不执行下降动作。传感器采用对射式光纤放大器的形式,光纤探头直径1毫米,安装在夹爪的微小空间内。光纤放大器主机安装在控制柜内,通过光缆连接探头。光缆长度2米,弯曲半径不小于25毫米。放大器面板上设有四位数字显示器,用于显示接收光强度数值。操作人员通过示教按钮设定检测阈值,将空载时的接收光强数值加上200作为阈值。当螺丝到达时光束被遮挡,接收光强下降至阈值以下,输出状态改变。传感器的响应时间为0.1毫秒,适应每分钟60个螺丝的锁付节拍。光纤探头表面为玻璃材质,接触油污后透光率下降。维护人员使用无尘纸蘸取酒精擦拭探头端面,每月一次。光缆与放大器连接处使用锁紧螺母固定,防止振动松动。放大器消耗电流为30毫安,输出为NPN集电极开路。拥有发明专利(ZL 2022 1 0048883.8),主要技术自主可控。江西注塑机械手防护防撞传感器多组信号输入
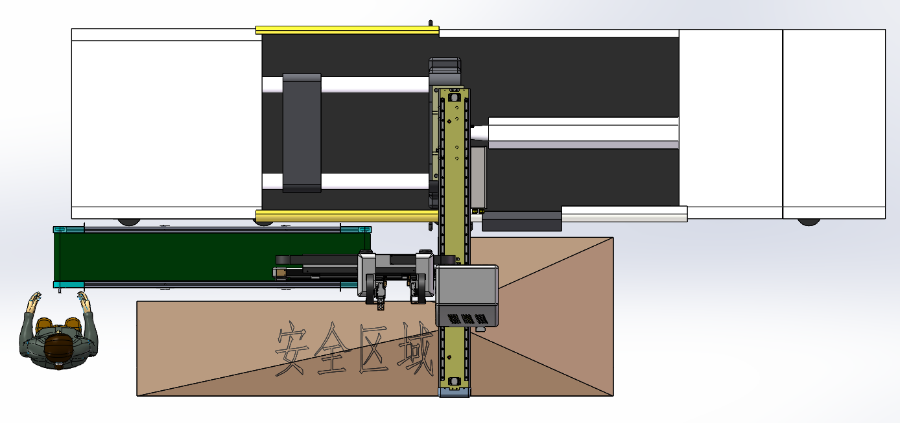
不同设备的安装空间和结构差异很大,有的只能正上方安装,有的只能侧装,有的需要倾斜一定角度。大德恒通防撞传感器支持20°至55°的倾斜安装角度,且在此范围内检测性能不受明显影响。安装调试手册中明确给出了不同安装高度(2.5米、3.6米)对应不同倾斜角度下的正向检测距离(5米、6米),用户可据此快速确定比较好安装位置。这种宽容的安装适应性,大幅降低了现场部署的难度,即使在空间受限或结构复杂的设备上,也能找到合适的安装方案,无需定制特殊支架或改造设备结构。湖北机械手失控防护防撞传感器代理价钱龙门机械手、桁架机械手理想之选,立体防护无盲区。

立体空间防护传感器在橡胶轮胎硫化机中用于检测模具开合状态。硫化机的模具分为上下两部分,合模时模具闭合形成密闭型腔,开模时模具分离取出轮胎。传感器安装在上模边缘的四个角,检测下模对应位置的距离。合模过程中传感器持续测量上下模之间的距离,距离数值不断减小。当四个角的距离值均小于0.5毫米且相互差异不超过0.1毫米时,控制系统判断模具已经闭合到位。此时硫化机开始保压加热。开模时传感器距离数值增大,达到50毫米时控制系统判断开模完成,允许机械手进入取胎。传感器采用激光三角测量原理,适用于近距离高精度检测。测量范围为零至100毫米,分辨率为0.01毫米。传感器输出的模拟量信号为0至10伏电压,送入可编程控制器的模拟量输入模块。硫化机工作温度较高,模具区域温度达到180摄氏度。传感器安装位置距离模具150毫米处,该处环境温度为70摄氏度。传感器外壳选用耐高温聚酰胺材料,内部电路板涂覆三防漆。维护人员每月校准一次传感器零点,使用标准量块置于检测距离处,调整传感器内部电位器使输出电压与标称值一致。
立体空间防护传感器在铸件清理打磨工作站中用于检测砂轮磨损情况。打磨机器人末端装有砂轮,对铸件表面进行打磨。砂轮在使用过程中直径逐渐减小,影响打磨位置精度。传感器安装在机器人臂上靠近砂轮的位置,测量砂轮外缘与参考点之间的距离。初始状态下砂轮直径为200毫米,传感器测量距离为50毫米。砂轮磨损后直径减小,传感器测量距离增加。当测量距离增加到55毫米时,控制系统自动补偿机器人轨迹,使砂轮与铸件的接触位置保持不变。当测量距离增加到60毫米时,控制系统判断砂轮已到达使用寿命,发出更换提示。机器人停止打磨动作,移动到工具更换站等待操作人员更换砂轮。传感器采用激光位移原理,分辨率为0.01毫米。激光光斑尺寸为0.5毫米×1毫米,能够精确照射砂轮外缘。打磨过程中产生的粉尘会沉降在传感器窗口上,传感器的气幕防尘系统使用0.2兆帕压缩空气持续吹扫窗口。防尘系统与机器人动作联动,机器人打磨时气幕开启,机器人待机时气幕关闭以节约压缩空气。传感器外壳防护等级IP65,供电为24伏直流。输出信号为4至20毫安电流,采用三线制连接方式。支持批量配置与固件升级,大幅降低大规模部署工作量。

立体空间防护传感器在自动焊接变位机中用于检测工件装夹状态。变位机将工件旋转到不同角度进行焊接,装夹不牢固时工件可能在旋转中滑落。传感器安装在变位机夹具的夹爪上,测量夹爪与工件表面之间的间隙。夹具闭合后,间隙距离应为零或接近零。传感器输出模拟量信号表示间隙数值,控制系统的显示器上实时显示该数值。间隙值大于0.5毫米时,控制系统判断工件未夹紧,禁止变位机旋转。间隙值在0至0.5毫米之间时允许旋转,但焊接电流输出被限制在额定值的百分之五十。只有当间隙值为零时才允许满电流焊接。传感器采用接触式测量方式,探头前端为红宝石球头,接触工件表面时产生位移。位移量通过内部差动变压器转换为电信号。红宝石球头硬度较高,长期使用不磨损。测量力为0.3牛顿,不会在工件表面留下压痕。传感器测量范围为0至5毫米,输出灵敏度为100毫伏每毫米。在焊接飞溅较多的区域,传感器表面覆盖耐高温防护罩。防护罩材料为聚四氟乙烯,飞溅物不易粘附。每次换班时操作人员取下防护罩检查探头状态,清理附着的飞溅颗粒。大德恒通防撞传感器采用AI大模型算法,精确区别人与物,只防人不误报。广西安全生产防护防撞传感器可切换多场景防护区域
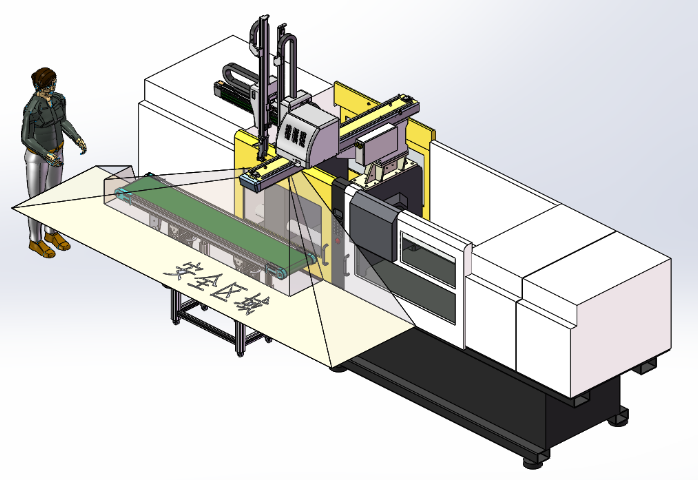
响应速度达30Hz,实时防护,杜绝安全事故发生。江西注塑机械手防护防撞传感器多组信号输入
传统安全光栅只能形成一条或几道光束组成的平面屏障,存在明显间隙,人员可能弯腰、侧身绕过而不被检测。大德恒通防撞传感器采用3D立体空间成像技术,在三维空间内构建完整的防护“体”,而非简单的“线”或“面”。无论人员以何种姿态进入——站立、蹲下、侧身还是伸手——传感器都能准确捕获并触发报警。这种立体防护能力对于机械手下行区域、冲压机周边等高风险场景尤为重要。用户可在软件中自由调整防护区域的长、宽、高,甚至设置多个不同高度的**检测层,真正做到“无死角覆盖,立体化防护”。江西注塑机械手防护防撞传感器多组信号输入
深圳市大德恒通科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同深圳市大德恒通科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!