引入智能防护传感方案,意味着将事后处置转向事前预防。其价值体现在全周期事故率的下降、停产时间的缩短以及生产布局的灵活调整上。长远而言,这为企业塑造了更安全、更可靠、更现代化的运营形象,形成隐形的竞争优势。尽管需要前期投入,但立体防护系统通过减少碰撞损失、降低停机频率、优化保险成本,往往能在合理周期内实现投资平衡。在产业升级背景下,这类投资直接支持了生产柔性化与安全本质化,是企业面向未来的一项基础建设。工业视觉感应传感器,实时识别产品外观缺陷!湖北安全防护防撞传感器灵活检测
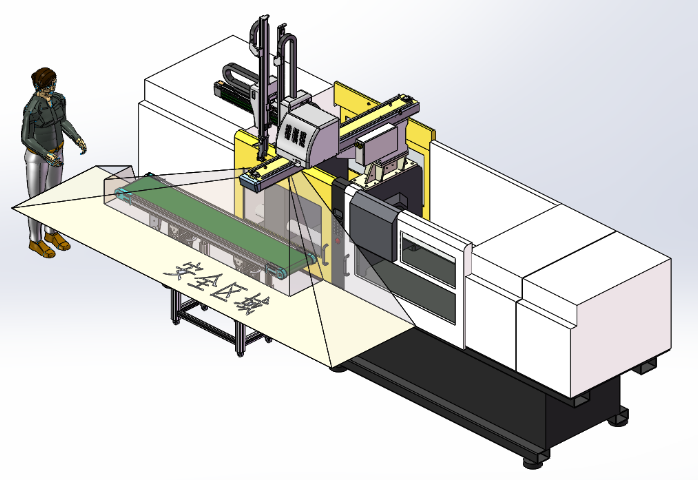
对于执行特殊工艺(如焊接、喷涂、打磨)的机械手,立体空间防护传感器的选型需考虑工艺环境的特殊性。大德恒通在实践中认识到,焊接区域的强弧光、飞溅,喷涂区域的雾化颗粒,打磨产生的粉尘,都可能对基于光学原理的传感器造成干扰或污染。为此,可能需要选择特定波长的激光传感器,或采取额外的防护罩、空气吹扫等保护措施。同时,防护区域的设定也要避开工艺本身产生的“无害”飞溅物,防止误触发。这体现了安全工程需要与工艺知识紧密结合。江西液压机防护传感器可切换多场景防护区域支持多机同时工作,抗干扰算法,适应复杂生产场景。

机器人自动化防护传感器项目的成功实施,离不开严谨的仿真与虚拟调试,这一方法论为大德恒通所推崇。在物理设备进场前,利用数字化孪生技术,在虚拟环境中完整构建生产线模型,进行机器人可达性分析、节拍仿真、布局优化乃至碰撞检测。虚拟调试则可以在连接真实控制系统的情况下,对程序逻辑进行充分验证。这种方法能够将大部分潜在问题在早期发现并解决,缩短现场调试时间,降低项目实施风险与成本,是实现高效、可靠交付的重要手段。
工业生产过程中,设备碰撞不*会造成设备损坏、生产停滞,还可能引发人员伤亡等严重后果,因此高效的防撞防护措施至关重要。大德恒通以技术创新为驱动,研发的工业安全防护防撞传感器,为工业企业提供了可靠的安全保障。这款传感器融合了精细的感知技术与智能的控制算法,能够实时监测设备的运行状态,对可能发生的碰撞风险进行预判,并自动触发防护机制。其具备的抗干扰能力,使其在复杂的工业环境中也能保持稳定的性能,无论是在高温的锻造车间,还是在潮湿的化工厂房,都能正常工作。传感器的响应速度快,能够在极短的时间内完成信号的采集、分析与传输,确保防护措施及时生效。大德恒通始终致力于为客户提供质量的产品与服务,这款防撞传感器的推出,不*解决了工业生产中的安全隐患,还为企业提升生产效率、降低运营成本提供了助力,推动工业安全防护领域的技术进步。提供标准安装支架与高柔电缆,部署更便捷可靠。

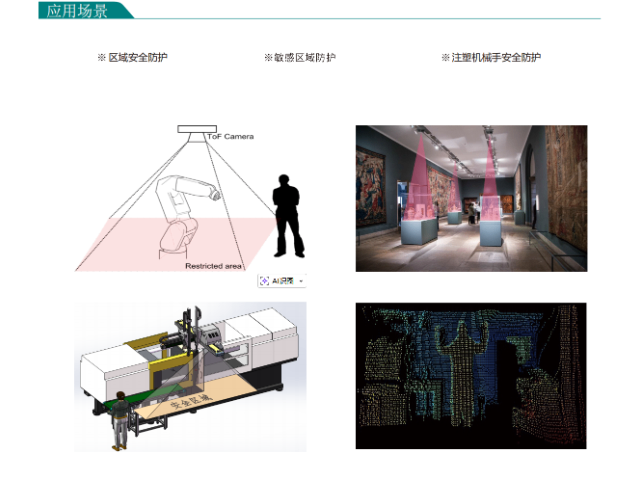
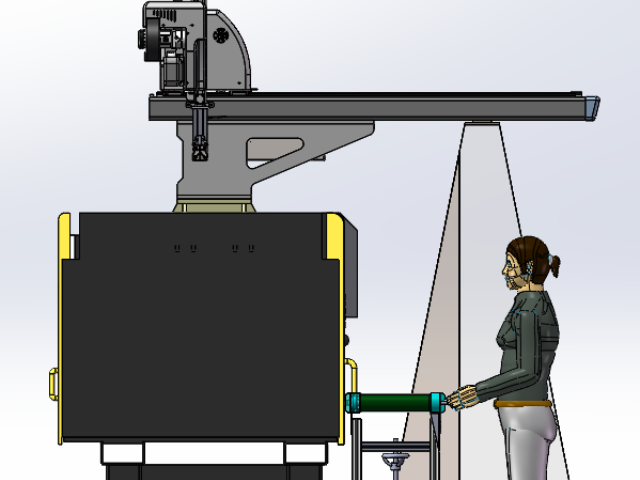
用户可以通过我们提供的简洁上位机软件,直观地自定义防护区域的三维形状与范围。软件界面支持绘制方形、圆形、多边形等多种几何形状,并可自由设定其长度、宽度及高度,从而在三维空间中“勾勒”出需要重点防护的危险区域。例如,可以为机械臂的活动范围设置一个跟随其运动轨迹的立方体防护区,也可以为生产线上的特定工位设置一个圆柱形的警示区域。这种灵活的定义能力,使得一套传感器系统能够适应不规则、多变化的机械设备与生产布局,实现“指哪护哪”的针对性防护,**提升了安全系统的实用性与经济性。融合多维度智能感知,大德恒通 AI 防护传感器覆盖监测范围,消除工业安全防护盲区。新疆冲压防护传感器智能调节
高精度检测防撞传感器,抗干扰强,支持多种检测算法,不误报。湖北安全防护防撞传感器灵活检测
在涉及多台机械手协同工作的复杂工作站中,立体空间防护传感器的部署需要具备全局视野。大德恒通在系统规划中强调,多机协作时,不*要防止人与机械手碰撞,也要防止机械手之间发生干涉。一套集中的、覆盖整个工作单元的立体感知系统,可能比每台机械手独自配备传感器更为高效和经济。它可以统一监控所有运动部件的轨迹,进行全局碰撞预测与避免,实现更优的协调控制。这要求传感器具备宽视野、高处理能力和与多控制器的协同通信能力。湖北安全防护防撞传感器灵活检测
深圳市大德恒通科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市大德恒通科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!