全自动多功能玻璃加工机组广泛应用于多个领域,包括但不限于: 汽车玻璃行业:能够满足不同车型、不同规格的汽车玻璃加工需求,为汽车制造商提供高质量的玻璃产品。 建筑玻璃行业:可用于加工各种建筑玻璃,如幕墙玻璃、门窗玻璃等,满足建筑行业对玻璃质量和精度的要求。 家具玻璃行业:能够满足家具制造商对玻璃面板、玻璃隔断等产品的加工需求,提供高质量的家具玻璃产品。 电子电器行业:可用于加工触摸屏、显示屏等电子产品的玻璃面板,满足电子电器行业对玻璃面板质量和精度的要求。 光学仪器行业:可用于加工各种光学镜片、棱镜等光学元件,满足光学仪器行业对玻璃元件的精度和稳定性的要求。一种异形玻璃自动定位装置,主要用于实现异形玻璃的自动定位。中国信义全自动多功能玻璃钻孔机

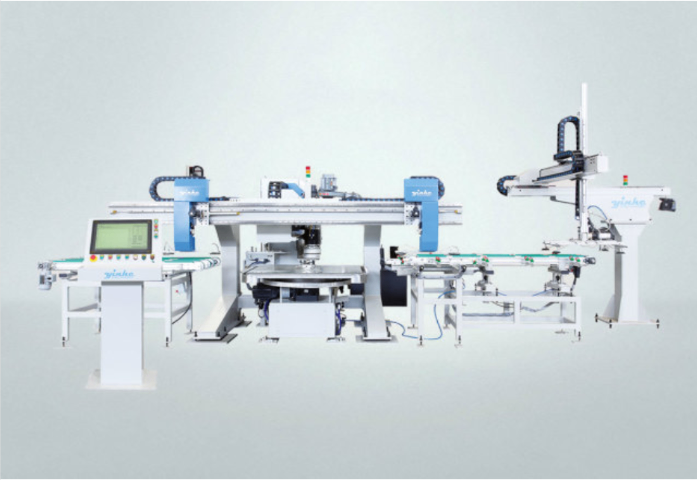
全景天窗,是安装在车顶的大面积安全玻璃,它打破了传统汽车天窗的尺寸和视野限制,为乘客提供了更加开阔的车内空间。安装全景天窗玻璃让整车颜值、空间感更强,观赏体验感更加舒适。据统计,配备全景天窗车型的渗透率从2014年的62.5%提升至2019年73.1%。全景天窗玻璃尺寸超大、厚度薄,精度要求高,所以加工难度很大。我公司研制的新能源车特型玻璃预处理切掰磨线可用于全景天窗玻璃预处理的智能装备。该智能装备安装了FANUC数控系统,把玻璃冷加工的预处理工艺与物料的搬运机械手相结合,一次完成玻璃的上片、切割、掰边、磨边、下片等预处理加工工艺过程,创造性地实现了玻璃无模板掰边、废料自动传送等复杂不规则玻璃图形加工,具有高精度、高加工速度和智能化的特点。中国智能化全自动多功能玻璃钻孔机保养威海银河光电设备股份有限公司全自动多功能玻璃加工机组是该公司自主研发的一款高等设备。
一种玻璃吸附装置,包括吸盘底座、真空吸盘、小O形圈和大O形圈,所述真空吸盘固定于所述吸盘底座的上方,所述真空吸盘与所述吸盘底座之间通过小O形圈和大O形圈密封连接,所述大O形圈位于所述小O形圈的外面。本实用新型提供的玻璃吸附装置在真空吸盘与吸盘底座之间设置小O形圈和大O形圈,起到密封真空吸盘,防止其漏气的作用,保证了真空吸盘良好的吸附力,更稳固地吸附固定玻璃,便于玻璃磨削加工。用本实用新型提供的玻璃吸附装置吸附玻璃板,不会对玻璃板造成损伤,且不会影响玻璃板边缘的磨削。此外,采用真空吸盘,方便调节吸附力大小。
本发明涉及一种汽车玻璃板切割磨边定位装置,其解决了玻璃板加工设备在对玻璃板毛坯进行玻璃板切割、玻璃板磨边等工艺时,在每一道工艺加工过程中,都需要对玻璃进行精确定位,就会出现质量问题的技术问题,其包括Y轴推送组件、X轴推送组件、Y轴托轮组件,Y轴托轮组件可升降地置于X轴推送组件下部,Y轴托轮组件升高后高于X轴推送组件;其可广泛应用于玻璃板加工技术领域。一种汽车玻璃板切割磨边定位装置,其特征在于:包括Y轴推送组件、X轴推送组件和Y轴托轮组件,所述Y轴托轮组件可升降地置于X轴推送组件下部,所述Y轴托轮组件升高后高于所述X轴推送组件。公司提供了完善的售后服务和技术支持,确保客户在使用过程中得到及时、有效的帮助。

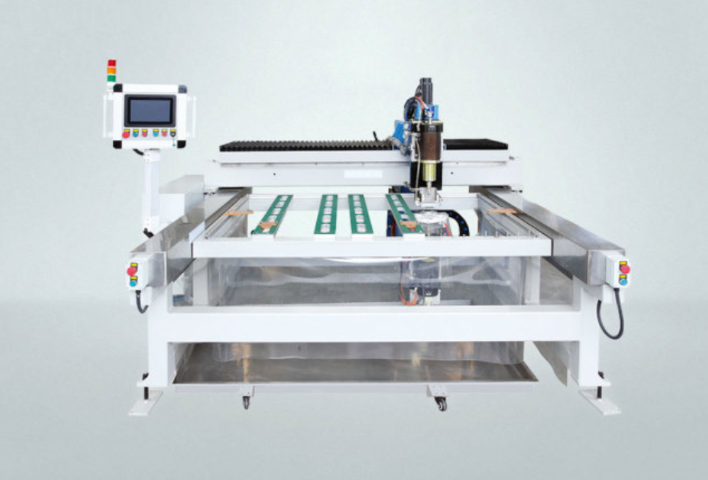
威海银河光电股份有限公司,深耕汽车玻璃加工领域,其全自动多功能玻璃加工机组在市场上以其优异的性能和先进的技术赢得了广大赞誉。全自动多功能玻璃加工机组是威海银河光电股份有限公司的旗舰产品,集成了数控技术、工业机器人技术和自动化控制技术,实现了从玻璃上片、定位、切割、去边、磨边、钻孔到出片的全程自动化操作。该机组以其高精度、高效率、高稳定性和定制化服务等特点,满足了汽车玻璃加工行业对高质量、高效率、多样化的需求。可用于加工各种光学镜片、棱镜等光学元件,满足光学仪器行业对玻璃元件的精度和稳定性的要求。山东进口全自动多功能玻璃钻孔机维护
YHCG01+YHHG01全自动多功能玻璃加工机组是其中的一款代表性产品。中国信义全自动多功能玻璃钻孔机
采用一致性控制解决新能源汽车特型玻璃加工过程质量管控问题。提出一种既能够保证全局好,又同时可以具有指定收敛速度的分布式协同设计方法。通过使用逆设计方法,同时考虑无领头者以及领导-跟随多智能体系统一致性意义下的全局问题。提出一系列具有指定收敛速度的全局分布式协同方法。通过使用区域极点配置方法,满足指定收敛速度的好控制增益可以通过求解线性矩阵不等式来给出。在此基础之上,提出一种改进的LQR好方法。针对有向图上的连续时间线性多智能体系统的一致性性能的调节问题进行研究。提出评估多智能体的一致性性能的两个指标:收敛速度和阻尼度。前者用来刻画多智能体系统达到协同一致的快慢,后者则被用来评估达到一致性过程中多智能体系统状态的震荡行为。针对智能体的一致性问题提出一种全新的控制协议设计方法。该协议可以通过调节自身的参数使得多智能体系统的状态渐近地按照指定的收敛速度和阻尼度达到一致。解决有向网络拓扑下连续时间线性多智能体系统的全局控制问题。领导-跟随和无领导一致性问题都被考虑了。基于线性系统逆控制理论,给出控制协议的参数表达式。中国信义全自动多功能玻璃钻孔机
一种玻璃磨边机转台装置,包括工作台,工作台的下端设有驱动装置,驱动装置的内部设置有驱动电机和旋转线圈...
【详情】一种玻璃板掰边装置,其解决了现有去除玻璃边的工艺效率低、成本高、质量低的技术问题,其包括横梁、支架、...
【详情】本发明涉及一种研磨轮修整装置,其解决了现有技术不能实现准确、可靠地对研磨轮进行修整的技术问题,其包括...
【详情】一种玻璃钻孔机滑板搬运缓冲装置,其解决了由于速度快,质量大,运动惯量大,容易出现位置偏差,难以满足玻...
【详情】银河光电以前是生产太阳能、非晶硅、电气组件的设备工厂。2012年,在光伏市场不景气的情况下,我们考虑...
【详情】一种玻璃磨轮损耗自动补偿装置,其解决了现有调整装置对研磨轮进行微调时精度低、调整不到位的技术问题,其...
【详情】2019年凭借稳定的产品质量,良好的客户口碑,公司收到了更多客户的青睐。国内多家大中型玻璃企业来我公...
【详情】一种玻璃磨边机转台装置,包括工作台,工作台的下端设有驱动装置,驱动装置的内部设置有驱动电机和旋转线圈...
【详情】威海银河光电股份有限公司,深耕汽车玻璃加工领域,其全自动多功能玻璃加工机组在市场上以其优异的性能和先...
【详情】一种异形玻璃自动定位装置,主要用于实现异形玻璃的自动定位,包括定位台支架,和六个定位组及两个同步带组...
【详情】一种玻璃钻孔机钻孔转台,其解决了现有的玻璃钻孔定位,受人为因素影响较大,存在定位偏差或不准确的技术问...
【详情】本发明涉及一种带有防滴漏装置的汽车玻璃切割头,其解决了现有的汽车玻璃切割头在切割时,只是简单的加入煤...
【详情】