- 品牌
- 凡华
- 型号
- 齐全
- 产地
- 无锡宜兴
- 可售卖地
- 全国
- 是否定制
- 是
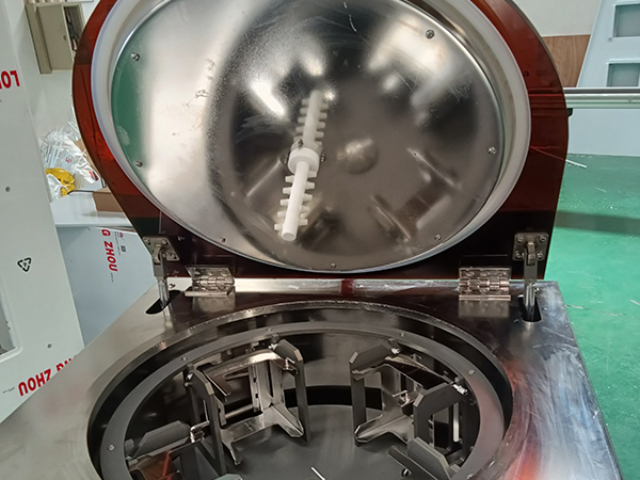
晶舟转换器的机械部件是运行关键,需悉心保养。定期检查机械臂关节,查看是否有松动或磨损。若发现关节活动异常,应及时紧固螺丝,并涂抹适量zhuan yong润滑剂,确保机械臂灵活运转,减少摩擦损耗。轨道作为晶圆传输的通道,要保持清洁与顺滑。每周使用干净的软布擦拭轨道表面,去除污垢和杂质。同时,检查轨道的平整度,若有变形需及时校正,防止晶圆在传输过程中出现偏差。传动链条也不容忽视,需定期检查其张紧度,确保链条传动稳定。若链条出现生锈迹象,应及时除锈并涂抹防锈油。做好机械部件保养,能保障晶舟转换器高效、精 zhun 运行,提升生产质量与效率。随着半导体技术的不断发展,晶舟转换器的性能和功能也在不断提升。天津FANHUA晶舟转换器供应商

晶舟转换器的工作基于自动化控制和机械运动原理。当接收到倒片指令后,控制系统首先根据晶圆的当前位置和目标位置,计算出机械臂的运动轨迹和翻转机构的动作参数。然后,控制系统驱动机械臂运动,使其末端的吸附或夹取装置准确地到达晶圆上方,通过真空吸附或机械夹取的方式将晶圆固定住。接着,机械臂按照预定轨迹将晶圆移动到翻转机构的指定位置,翻转机构在电机的驱动下将晶圆平稳地翻转到所需角度,机械臂再将翻转后的晶圆搬运到目标承载面上,完成晶圆的倒片操作。在整个过程中,定位与校准系统不断监测晶圆的位置和姿态,实时向控制系统反馈信息,控制系统根据反馈数据对机械臂和翻转机构进行微调,以确保倒片过程的高精度和可靠性。凡华晶舟转换器供应商用户反馈显示,晶舟转换器的操作界面简洁明了,易于上手。
晶舟转换器犹如半导体制造行业的效率引擎,全力推动着生产效率的提升。其高效运作基于优化的机械结构与快速响应的控制系统。机械结构经过精心设计,减少了不必要的运动环节,使机械臂的运动更加简洁高效。同时,采用高性能的驱动电机,为机械臂提供强大动力,实现快速的晶圆抓取与转移动作。控制系统具备快速的数据处理能力,能够迅速响应操作人员的指令,并实时调整设备运行参数,确保整个转移过程高效流畅。晶舟转换器在提高生产效率方面成果xian zhu 。它的高速转移能力使得每小时能够处理更多的晶圆,相比传统设备,效率提升可达数倍之多。而且,设备具备自动上下料功能,能够与上下游生产设备无缝对接,实现生产流程的自动化连续运行,进一步节省了生产时间。此外,晶舟转换器的可靠性极高,减少了因设备故障导致的生产中断时间,保证了生产效率的稳定性。在实际生产场景中,晶舟转换器广泛应用于各类半导体制造企业。无论是大规模量产的生产线,还是小批量试制的研发车间,它都能凭借高效的性能满足企业的生产需求。可以说,晶舟转换器是半导体制造企业提高生产效率、增强市场竞争力的重要利器。
若晶舟转换器配备称重部件,其保养对确保晶圆重量检测准确很关键。定期清洁称重传感器表面,去除灰尘和杂物,避免影响称重精度。清洁时要小心操作,防止损坏传感器。检查称重平台是否平整,有无变形或磨损。若称重平台不平整,会导致称重数据不准确,需及时修复或更换。定期对称重部件进行校准,使用标准砝码进行称重测试,对比显示数值与标准砝码重量是否一致。若存在偏差,按照校准流程进行调整。做好称重部件保养,能为晶圆质量控制提供准确的重量数据。晶舟转换器支持音频输出转换,让您的耳机或音响能够适应不同类型的设备接口。
晶舟转换器在半导体工艺验证中的应用:
半导体工艺验证是确保新工艺可行性和稳定性的关键步骤,晶舟转换器在此过程中发挥着重要作用。在新工艺的光刻验证中,晶舟转换器将涂有光刻胶的晶圆从存储晶舟转移到光刻机晶舟。由于新工艺可能对光刻精度和位置有特殊要求,晶舟转换器凭借其可灵活调整的定位参数和高精度的转移能力,满足新工艺的验证需求。通过多次精 zhun 转移,观察光刻图案的质量和位置精度,评估新工艺在光刻环节的可行性。在蚀刻工艺验证时,晶舟转换器把光刻后的晶圆转移至蚀刻设备晶舟。它能根据新工艺的蚀刻要求,精确控制晶圆在蚀刻液中的停留时间和位置,帮助工艺工程师判断蚀刻效果是否符合预期。晶舟转换器在半导体工艺验证中的精 zhun 操作,为新工艺的成功开发和应用提供了有力支持。 在会议室,晶舟转换器能让您的笔记本电脑连接到投影仪,进行流畅的演示。凡华晶舟转换器供应商
在录制工作室,转换器能让您的专业音频设备连接到电脑上,进行高质量的音频录制和编辑。天津FANHUA晶舟转换器供应商
晶舟转换器工作流程:
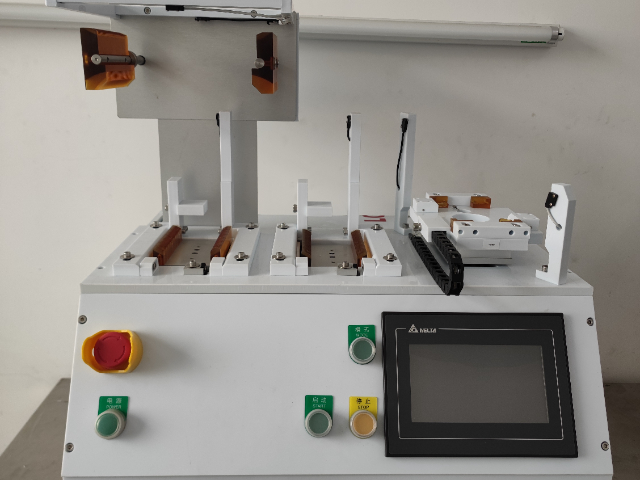
一、晶舟识别与定位:当晶舟进入晶舟转换器的工作区域时,设备首先通过安装在特定位置的传感器对晶舟进行识别。控制系统根据传感器反馈的信息,计算出晶舟的精确位置,并控制机械手臂移动到相应位置进行抓取准备。二、晶舟抓取:机械手臂按照控制系统的指令,精确地移动到晶舟上方,抓取机构启动,通过特定的方式与晶舟进行连接。在抓取过程中,抓取机构会实时监测抓取力的大小,确保抓取的稳定性。一旦抓取成功,机械手臂会缓慢提升晶舟,同时再次检查晶舟的状态,确保其在搬运过程中的安全性。
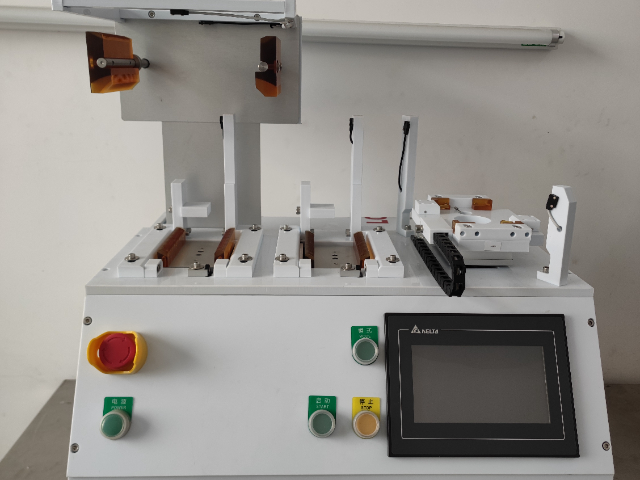
三、晶舟转移:机械手臂在动力驱动系统的带动下,沿着导轨快速移动到目标设备的接口位置。在移动过程中,控制系统会对机械手臂的运动轨迹进行实时监控和调整,确保晶舟在转移过程中不会发生碰撞或晃动。当机械手臂到达目标位置后,会进行精确的定位,使晶舟与目标设备的接口完美对接。
四、晶舟放置:在确认晶舟与目标设备接口对准无误后,抓取机构松开晶舟,将其平稳地放置在目标设备上。然后,机械手臂撤离,完成一次晶舟转换操作。整个过程在控制系统的精确控制下,高效、准确地完成,确保了半导体制造过程中晶舟流转的顺畅性。 天津FANHUA晶舟转换器供应商

- 河北凡华晶舟转换器价格 2026-03-13
- 浙江FXDP100晶舟转换器生产厂家 2026-03-13
- 广东凡华晶舟转换器公司 2026-03-11
- 上海晶舟转换器多少钱 2026-03-10
- 上海晶舟转换器公司 2026-03-08
- 河北FANHUA晶舟转换器生产厂家 2026-03-03
- 四川晶舟转换器 2026-03-03
- 河北FXDP100晶舟转换器价格 2026-03-03