机器人或机械手各动作的最大行程确定之后,可根据生产需要的工作节拍分配每个动作的时间,进而确定各动作的运动速度。如一个机器人操作臂要完成某一工件的上料过程,需完成夹紧工件,手臂升降、伸缩、回转等一系列动作,这些动作都应该在工作节拍所规定的时间内完成。至于各动作的时间究竟应如何分配,则取决于很多因素,不是一般的计算所能确定的。要根据各种因素反复考虑,并试作各动作的分配方案,进行比较平衡后,才能确定。节拍较短时,更需仔细考虑。 [3] 机器人操作臂的总动作时间应小于或等于工作节拍。如果两个动作同时进行,要按时间较长的计算。一旦确定了最大行程和动作时间,其运动速度也就确定下来了。机器人的的参考价格大概是多少?浙江智能机器人商家

优越机器人售后服务与支持,让您无后顾之忧在机器人行业,我们深知售后服务与支持的重要性。因此,我们为您提供多方面的售后保障,确保您的机器人运行顺畅,发挥很大效能。保修服务:我们承诺,自购买之日起,机器人享受长达的质保服务。在此期间,任何因制造缺陷导致的问题,我们都将提供维修或更换部件。维护与升级:为了确保机器人的持续稳定运行,我们提供专业的维护服务。定期的检查、清洁和调整,能够延长机器人的使用寿命。同时,我们不断推出软件升级,让您的机器人始终保持很新功能。培训与支持:我们重视客户的培训与指导。购买机器人后,您将获得多方面的操作培训,确保您能够熟练掌握机器人的各项功能。此外,我们的技术支持团队随时待命,解答您在使用过程中的任何疑问。选择我们的机器人,不仅意味着您拥有了一款高效、智能的产品,更意味着您获得了一站式的售后服务与支持。我们致力于为您创造很佳的使用体验,让机器人成为您生活中的得力助手。常州自动化焊接机器人批发商口碑好的机器人的公司联系方式。
优越机器人售后服务与支持,让您无后顾之忧当您选择我们的机器人产品时,您不仅获得了一台高效、智能的设备,更享受到了我们多方面、贴心的售后服务与支持。我们为每台机器人提供长达两年的质保期,确保在正常使用情况下,因制造缺陷导致的任何故障都能得到及时、的维修。此外,我们还提供终身维护服务,无论您的机器人是否仍在保修期内,我们都将竭诚为您提供专业的技术支持和维修服务。为了让您更好地掌握机器人的使用技巧,我们提供多方面的培训服务。我们的行家团队将为您详细讲解机器人的各项功能、操作方法以及日常维护事项,确保您能够充分发挥机器人的性能优势。我们深知,机器人的正常运行对您的工作至关重要。因此,我们承诺提供小时在线客服支持,随时为您解答使用过程中遇到的任何问题。同时,我们还定期发布软件更新和升级服务,确保您的机器人始终保持前面的技术水平和优越的性能表现。选择我们的机器人,就是选择了专业、高效和贴心的售后服务与支持。让我们携手共创美好未来!
我们很高兴向您介绍我们的机器人产品,这是一款专为市场推广而设计的智能助手。我们的机器人具有以下特性和功能,以满足您的需求:高效的自动化工具:我们的机器人能够自动执行各种任务,如内容生成、数据分析和市场调研等。这将很大提高您的工作效率,节省时间和人力成本。智能数据分析:我们的机器人能够收集和分析大量的市场数据,为您提供准确的市场洞察和竞争分析。这将帮助您做出明智的决策,优化市场策略。个性化推荐:我们的机器人能够根据用户的需求和偏好,提供个性化的推荐和建议。这将帮助您更好地了解您的目标客户,并提供更有针对性的市场推广方案。多渠道营销:我们的机器人支持多种渠道的市场推广,包括社交媒体、搜索引擎和电子邮件等。这将帮助您覆盖更很广的受众,并提高品牌曝光度。哪家的机器人价格比较低?

机器人精度包括定位精度和重复定位精度。定位精度是指机器人手部实际到达位置与目标位置的差异。重复定位精度是指机器人重复定位其手部于同一目标位置的能力,可以用标准偏差这个统计量来表示。它是衡量一系列误差值的密集度,即重复度。 [3] 机器人操作臂的定位精度是根据使用要求确定的,而机器人操作臂本身所能达到的定位精度,取决于定位方式、运动速度、控制方式、臂部刚度、驱动方式、缓冲方法等因素。 [3] 工艺过程的不同,对机器人操作臂重复定位精度的要求也不同。哪家的机器人的价格低?江苏工业智能机器人量大从优
机器人公司的联系方式。浙江智能机器人商家
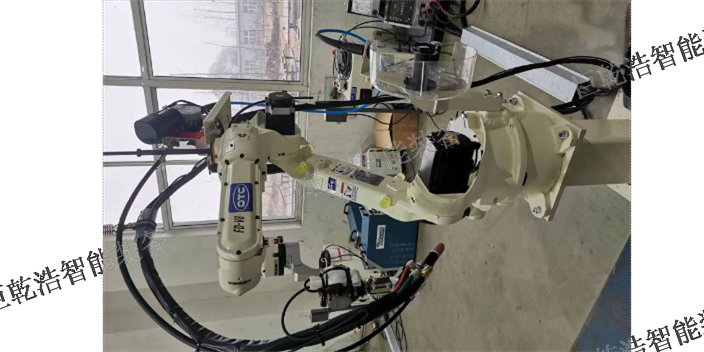
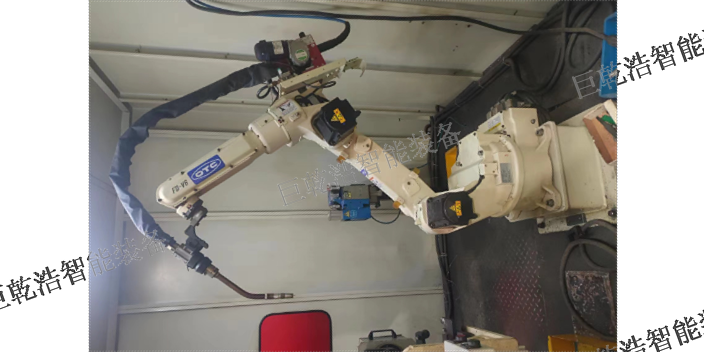
机器人(Robot)是自动执行工作的机器装置。一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统。机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。执行机构即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。出于拟人化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持器或末端执行器)和行走部(对于移动机器人)等。浙江智能机器人商家